#include <OMKSimulatedObject.h>
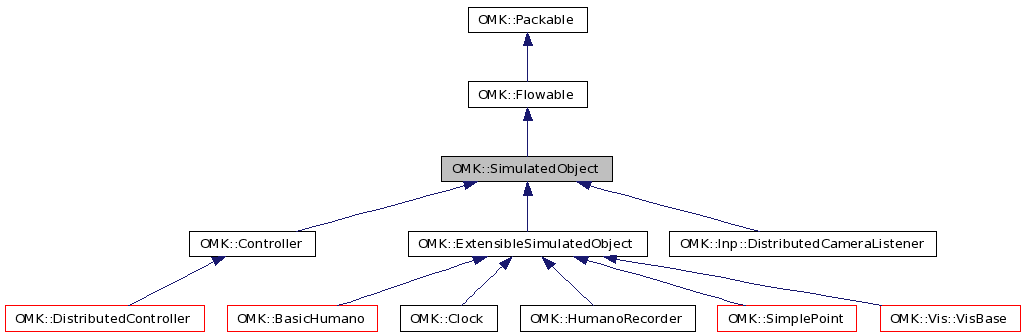
Inheritance diagram for OMK::SimulatedObject:
Public Member Functions | |
member functions for queries using the simulation tree | |
| template<typename Type> | |
| std::list< const ObjectDescriptor * > * | listSonsOfType () |
| list the sons of this object of a certain type in the simulation tree. | |
| template<typename Type> | |
| std::list< const ObjectDescriptor * > * | listBrothersOfType () |
| get the name of the brothers, of a certain type, of the simulated object in the simualtion tree warning : the underlying implementation relies on dynamic_cast, which implies usual restrictions on it's use in the constructor (object might not find itself) | |
| template<typename Type> | |
| std::list< const ObjectDescriptor * > * | listDescendantsOfType () |
| list of descendants, of a certain type, of this simulated object in the simulation tree | |
| virtual bool | isAncestor (const Name &name) |
| isAncestor | |
| virtual SimulatedObject * | getFather () const |
| get the simulated object's father in the simulation tree if the simulated object has a father WARNING : if any other information than a pointer to the object simulating the father is needed, please use getFathersDescriptor() to access that information | |
| virtual const ObjectDescriptor & | getFathersDescriptor () const |
| get the name of the simulated object's father in the simulation tree | |
Accessors. | |
| virtual const Name & | getName () const |
| get the name of the simulated object | |
| virtual Controller & | getController () const |
| get the controler of the simulated object | |
| ObjectHandle * | getObjectHandle () const |
| get the object handle. Usage by the kernel. | |
| void | setObjectHandle (ObjectHandle *objectHandle) |
| set the object handle : feils if an object handle allready exists | |
| const ObjectDescriptor & | getObjectDescriptor () const |
| gain access to the object descriptor | |
| virtual const NameToPointerMap< InputNT > & | getInputTable () const |
| get a reference to the table of the simulated object's inputs | |
| virtual const NameToPointerMap< OutputNT > & | getOutputTable () const |
| get a reference to the table of the simulated object's outputs | |
| virtual const NameToPointerMap< OutputNT > & | getControlParameterTable () const |
| get a reference to the table of the simulated object's parameters | |
| virtual const std::list< EventListener * > & | getEventListeners () const |
| get a reference to the list of EventListeners | |
| virtual InputNT * | getPointerToInputNamed (const Name &inputName) const |
| get a pointer to an input | |
| virtual OutputNT * | getPointerToOutputNamed (const Name &outputName) const |
| get a pointer to an output | |
| virtual OutputNT * | getPointerToControlParameterNamed (const Name ¶meterName) const |
| get a pointer to a control parameter | |
| virtual const ConfigurationParameterDescriptor * | getConfigurationParameters () const |
| get a pointer to the structure describing our configuration parameters | |
member function whose redifinition enables creation of specialised simulated object . | |
| virtual void | postConstruction () |
| Complete constructor the object. | |
| virtual void | init () |
| initialise the object. | |
| virtual void | emigrate () |
| CHADI. | |
| virtual void | immigrate (Event *event) |
| virtual void | compute () |
| compute evolution of this object. | |
| virtual void | finish () |
| finish calculation of evolution. | |
| virtual void | extract (std::istream &in=std::cin) |
| extract pertinant information for this object from an input stream | |
| virtual void | insertInStream (std::ostream &out=std::cout) const |
| insert pertinant information for this object in an output stream | |
| virtual void | unpack (IncomingSynchronisationMessage &) |
| unpack an update from a message | |
| virtual void | unpackAllValues (IncomingSynchronisationMessage &) |
| unpack all necessary info if the object is a mirror from a message | |
| virtual void | pack (OutgoingSynchronisationMessage &) const |
| pack update information in a message | |
| virtual void | packAllValues (OutgoingSynchronisationMessage &) const |
| pack initial information in a message | |
| virtual void | prepareEventProcessing (std::list< Event * > &) |
| prepareEventProcessing called before any events are processed if any clean up is needed after the preceeding simulation step | |
| virtual bool | processEvent (Event *) |
| process an event for this object. | |
| virtual void | eventsProcessed (std::list< Event * > &) |
| eventsProcessed called once all the events have been handled to processEvent, and those who have been succesfully processed (processEvent having return true ) have been destroyed | |
| virtual bool | processEventsASAP () const |
| event processing mode. | |
| virtual void | addEventListener (EventListener &) |
| Event listener registration. | |
| void | registerEventListenerForEvent (EventListener &eventListener, const EventIdentifier &eventId) |
| Event listener registration for an event id. | |
| void | unregisterEventListener (EventListener &eventListener) |
| Unregistration of an event listener for the simulation object. | |
signal generation and bookeeping | |
| void | fireSignal (const EventIdentifier &sig) |
| fire a signal wich will be seen by anybody registred for that signal | |
| template<typename UserType> | |
| void | fireValuedSignal (const EventIdentifier &sig, const UserType &value) |
| fire a signal which carries an associated value | |
| virtual bool | registerForSignalBy (const EventIdentifier &sig, const Name &producer) |
| register for a signal fired by a particular simulated object | |
| virtual bool | registerForSignalBy (const EventIdentifier &sig, const Name &producer, const EventIdentifier &eventId) |
| register for a signal fired by a particular simulated object | |
| virtual bool | registerForSignalBy (const EventIdentifier &sig, SimulatedObject *producer) |
| register for a signal fired by a particular simulated object | |
| virtual bool | registerForSignalBy (const EventIdentifier &sig, SimulatedObject &producer) |
| register for a signal fired by a particular simulated object | |
| virtual bool | registerForSignalBy (const EventIdentifier &sig, SimulatedObject *producer, const EventIdentifier &eventId) |
| register for a signal fired by a particular simulated object | |
| virtual bool | registerForSignalBy (const EventIdentifier &sig, SimulatedObject &producer, const EventIdentifier &eventId) |
| register for a signal fired by a particular simulated object | |
| virtual bool | registerForSignal (const EventIdentifier &sig) |
| register for a particular signal fired by anybody | |
| virtual bool | registerForSignal (const EventIdentifier &sig, const EventIdentifier &eventId) |
| register for a particular signal fired by anybody | |
| virtual bool | cancelRegistrationForSignalBy (const EventIdentifier &sig, const Name &producer) |
| cancel registration for a signal fired by a particular simulated object | |
| virtual bool | cancelRegistrationForSignalBy (const EventIdentifier &sig, SimulatedObject *producer) |
| cancel registration for a signal fired by a particular simulated object | |
| virtual bool | cancelRegistrationForSignalBy (const EventIdentifier &sig, SimulatedObject &producer) |
| cancel registration for a signal fired by a particular simulated object | |
| virtual bool | cancelRegistrationForSignal (const EventIdentifier &sig) |
| cancel registration for a particular signal fired by anybody | |
attribute declaration | |
| template<typename Type> | |
| Input< Type > & | addInput (const Name &inputName, bool makeConnectable=false, int precisionLevel=OMK::Type::PolatorNT::defaultPrecisionLevel) |
| add a input to the simulated object | |
| template<typename Type> | |
| SensitiveInput< Type > & | addSensitiveInput (const Name &inputName, bool makeConnectable=false, int precisionLevel=OMK::Type::PolatorNT::defaultPrecisionLevel) |
| add a sensitive input to the simulated object | |
| template<typename Type> | |
| SensitiveNotifyingInput< Type > & | addSensitiveNotifyingInput (const Name &inputName, bool makeConnectable=false, int precisionLevel=OMK::Type::PolatorNT::defaultPrecisionLevel) |
| add a sensitive Notifying input to the simulated object | |
| void | deleteInput (const Name &inputName) |
| delete an input from the list of inputs of the simulated object WARNING : consideration is being given for the removal of this member function | |
| template<typename Type> | |
| Output< Type > & | addOutput (const Name &outputName, OMK::Type::PolatorNT *polator=0) |
| add an output to the simulated object | |
| template<typename Type> | |
| ControlParameter< Type > & | addControlParameter (const Name &controlParameterName, OMK::Type::PolatorNT *polator=0) |
| add a control parameter to the simulated object | |
| template<typename Type> | |
| InputAlias< Type > & | addInputAlias (const Name &aliasName, const Name &aliasedObjectName, const Name &aliasedInputName, int precisionLevel=OMK::Type::PolatorNT::defaultPrecisionLevel) |
| add an input which is an alias to an input of an other object | |
| template<typename Type> | |
| SensitiveInputAlias< Type > & | addSensitiveInputAlias (const Name &aliasName, const Name &aliasedObjectName, const Name &aliasedInputName, int precisionLevel=OMK::Type::PolatorNT::defaultPrecisionLevel) |
| add an sensitive input which is an alias to an input of an other object | |
| template<typename Type> | |
| SensitiveNotifyingInputAlias< Type > & | addSensitiveNotifyingInputAlias (const Name &aliasName, const Name &aliasedObjectName, const Name &aliasedInputName, int precisionLevel=OMK::Type::PolatorNT::defaultPrecisionLevel) |
| add a sensitive Notifying input which is an alias to an input of an other object | |
| template<typename Type> | |
| OutputAlias< Type > & | addOutputAlias (const Name &aliasName, const Name &aliasedObjectName, const Name &aliasedOutputName, OMK::Type::PolatorNT *interp=0) |
| add an output which is an alias to the output of an ancestor in the simulation tree | |
date and duration manipulation methods | |
| virtual const Date & | getSimulatedDate () const |
| get the simulated date | |
| float | getPeriod () const |
| getPeriod this is a shorthand for 1 / _objectDescriptor.Frequency () is expressed in seconds | |
member function related to event sending | |
| void | sendEvent (const Name &receiver, const EventIdentifier &eventId) |
| send an event | |
| void | sendEvent (SimulatedObject *receiver, const EventIdentifier &eventId) |
| send an event | |
| void | sendEvent (SimulatedObject &receiver, const EventIdentifier &eventId) |
| send an event | |
| template<typename UserType> | |
| void | sendValuedEvent (const Name &receiver, const EventIdentifier &eventId, const UserType &userInfo) |
| send a valued event | |
| template<typename UserType> | |
| void | sendValuedEvent (SimulatedObject *receiver, const EventIdentifier &eventId, const UserType &userInfo) |
| send a valued event | |
| template<typename UserType> | |
| void | sendValuedEvent (SimulatedObject &receiver, const EventIdentifier &eventId, const UserType &userInfo) |
| send a valued event | |
| void | sendEvent (const Event &event) |
| send an event. | |
| void | sendEvent (Event *event) |
| send the event pointed to by event warning : after this member function is called, *event should be considered as deleted, as the controler will delete it at any time : use previous member function if you want Mask to copy the event. | |
Protected Attributes | |
| Controller & | _controller |
| reéférence sur le controleur | |
| const ObjectDescriptor & | _objectDescriptor |
| référence sur le descripteur d'objet | |
| NameToPointerMap< InputNT > | _inputTable |
| the input table | |
| NameToPointerMap< OutputNT > | _outputTable |
| the output table | |
| NameToPointerMap< OutputNT > | _controlParameterTable |
| the table of control parameters | |
| std::list< EventListener * > | _listOfEventListeners |
| the list of Event listeners of that object | |
| ObjectHandle * | _objectHandle |
| pointeur on the associated objectHandle | |
Friends | |
| class | InputNT |
A simulation object is completely initialised in 4 to 6 steps :
Definition at line 72 of file OMKSimulatedObject.h.
| SimulatedObject::SimulatedObject | ( | Controller & | ctrl, | |
| const ObjectDescriptor & | objectDescription | |||
| ) |
constructor
Definition at line 70 of file OMKSimulatedObject.cpp.
References _objectDescriptor, and OMK::ObjectDescriptor::_pointerToSimulatedObject.
00070 : 00071 Flowable(), 00072 _controller ( ctrl ), 00073 _objectDescriptor ( objectDecriptor ), 00074 _objectHandle ( NULL ) 00075 { 00076 _objectDescriptor._pointerToSimulatedObject = this ; 00077 }
| SimulatedObject::~SimulatedObject | ( | ) | [virtual] |
destructor
Definition at line 80 of file OMKSimulatedObject.cpp.
References _controlParameterTable, _inputTable, _listOfEventListeners, _objectDescriptor, _outputTable, OMK::ObjectDescriptor::_pointerToSimulatedObject, getPointerToControlParameterNamed(), getPointerToInputNamed(), getPointerToOutputNamed(), OMK_DEBUG_OMK_EXEC, and OMTRACEID.
00081 { 00082 // destroy inputs, outputs and control parameters 00083 00084 NameToPointerMap<OutputNT>::iterator pOutput; // iterateur 00085 OutputNT *outputCourante; 00086 NameToPointerMap<OutputNT>::iterator pParam; // iterateur 00087 OutputNT *paramCourant; 00088 NameToPointerMap<InputNT>::iterator pInput; // iterateur 00089 InputNT *inputCourant; 00090 00091 // Pour toutes les outputs, on detruit ; 00092 00093 OMTRACEID( OMK_DEBUG_OMK_EXEC, "SimulatedObject:: ~SimulatedObject () : control parameters destruction" ) ; 00094 for(pParam= _controlParameterTable.begin(); pParam!= _controlParameterTable.end(); pParam++) 00095 { 00096 paramCourant = getPointerToControlParameterNamed ((*pParam).first); 00097 delete paramCourant; 00098 } 00099 OMTRACEID( OMK_DEBUG_OMK_EXEC, "SimulatedObject:: ~SimulatedObject () : control parameters destruction done" << std::endl << "inputs destruction" ) ; 00100 for(pInput= _inputTable.begin(); pInput!=_inputTable.end();pInput++) 00101 { 00102 inputCourant = getPointerToInputNamed ((*pInput).first); 00103 delete inputCourant ; 00104 } 00105 OMTRACEID( OMK_DEBUG_OMK_EXEC, "SimulatedObject:: ~SimulatedObject () : inputs destruction done" << std::endl << "outputs destruction" ) ; 00106 for(pOutput= _outputTable.begin(); pOutput!= _outputTable.end(); pOutput++) 00107 { 00108 outputCourante = getPointerToOutputNamed ((*pOutput).first); 00109 delete outputCourante; 00110 } 00111 OMTRACEID( OMK_DEBUG_OMK_EXEC, "SimulatedObject:: ~SimulatedObject () : outputs destruction done" << std::endl << "encapsulated classes creators destruction " ) ; 00112 00113 // update the object descriptor 00114 _objectDescriptor._pointerToSimulatedObject = NULL ; 00115 00116 // Delete all the remaining event listeners 00117 for( std::list <EventListener *>::iterator listener = _listOfEventListeners.begin() ; 00118 listener != _listOfEventListeners.end() ; listener = _listOfEventListeners.begin() ) 00119 { 00120 delete *listener ; 00121 } 00122 OMTRACEID( OMK_DEBUG_OMK_EXEC, "SimulatedObject:: ~SimulatedObject () : done" ) ; 00123 }
| SimulatedObject::SimulatedObject | ( | Controller & | ctrl, | |
| const ObjectDescriptor & | objectDescription | |||
| ) |
constructor
Definition at line 70 of file OMKSimulatedObject.cpp.
References _objectDescriptor, and OMK::ObjectDescriptor::_pointerToSimulatedObject.
00070 : 00071 Flowable(), 00072 _controller ( ctrl ), 00073 _objectDescriptor ( objectDecriptor ), 00074 _objectHandle ( NULL ) 00075 { 00076 _objectDescriptor._pointerToSimulatedObject = this ; 00077 }
| SimulatedObject::~SimulatedObject | ( | ) | [virtual] |
destructor
Definition at line 80 of file OMKSimulatedObject.cpp.
References _controlParameterTable, _inputTable, _listOfEventListeners, _objectDescriptor, _outputTable, OMK::ObjectDescriptor::_pointerToSimulatedObject, getPointerToControlParameterNamed(), getPointerToInputNamed(), getPointerToOutputNamed(), OMK_DEBUG_OMK_EXEC, and OMTRACEID.
00081 { 00082 // destroy inputs, outputs and control parameters 00083 00084 NameToPointerMap<OutputNT>::iterator pOutput; // iterateur 00085 OutputNT *outputCourante; 00086 NameToPointerMap<OutputNT>::iterator pParam; // iterateur 00087 OutputNT *paramCourant; 00088 NameToPointerMap<InputNT>::iterator pInput; // iterateur 00089 InputNT *inputCourant; 00090 00091 // Pour toutes les outputs, on detruit ; 00092 00093 OMTRACEID( OMK_DEBUG_OMK_EXEC, "SimulatedObject:: ~SimulatedObject () : control parameters destruction" ) ; 00094 for(pParam= _controlParameterTable.begin(); pParam!= _controlParameterTable.end(); pParam++) 00095 { 00096 paramCourant = getPointerToControlParameterNamed ((*pParam).first); 00097 delete paramCourant; 00098 } 00099 OMTRACEID( OMK_DEBUG_OMK_EXEC, "SimulatedObject:: ~SimulatedObject () : control parameters destruction done" << std::endl << "inputs destruction" ) ; 00100 for(pInput= _inputTable.begin(); pInput!=_inputTable.end();pInput++) 00101 { 00102 inputCourant = getPointerToInputNamed ((*pInput).first); 00103 delete inputCourant ; 00104 } 00105 OMTRACEID( OMK_DEBUG_OMK_EXEC, "SimulatedObject:: ~SimulatedObject () : inputs destruction done" << std::endl << "outputs destruction" ) ; 00106 for(pOutput= _outputTable.begin(); pOutput!= _outputTable.end(); pOutput++) 00107 { 00108 outputCourante = getPointerToOutputNamed ((*pOutput).first); 00109 delete outputCourante; 00110 } 00111 OMTRACEID( OMK_DEBUG_OMK_EXEC, "SimulatedObject:: ~SimulatedObject () : outputs destruction done" << std::endl << "encapsulated classes creators destruction " ) ; 00112 00113 // update the object descriptor 00114 _objectDescriptor._pointerToSimulatedObject = NULL ; 00115 00116 // Delete all the remaining event listeners 00117 for( std::list <EventListener *>::iterator listener = _listOfEventListeners.begin() ; 00118 listener != _listOfEventListeners.end() ; listener = _listOfEventListeners.begin() ) 00119 { 00120 delete *listener ; 00121 } 00122 OMTRACEID( OMK_DEBUG_OMK_EXEC, "SimulatedObject:: ~SimulatedObject () : done" ) ; 00123 }
| std::list< const ObjectDescriptor * > * OMK::SimulatedObject::listSonsOfType | ( | ) |
list the sons of this object of a certain type in the simulation tree.
warning : the underlying implementation relies on dynamic_cast, which implies usual restrictions on it's use in the constructor (object might not find itself)
Definition at line 15 of file OMKSimulatedObject.inl.
References getObjectDescriptor().
00016 { 00017 return getObjectDescriptor().template listSonsOfType< Type >() ; 00018 }
| std::list< const ObjectDescriptor * > * OMK::SimulatedObject::listBrothersOfType | ( | ) |
get the name of the brothers, of a certain type, of the simulated object in the simualtion tree warning : the underlying implementation relies on dynamic_cast, which implies usual restrictions on it's use in the constructor (object might not find itself)
Definition at line 21 of file OMKSimulatedObject.inl.
References getObjectDescriptor(), and OMASSERT.
00022 { 00023 OMASSERT( getObjectDescriptor().getFathersObjectDescriptor() != 0 ) ; 00024 return getObjectDescriptor(). 00025 getFathersObjectDescriptor()->template listSonsOfType< Type >() ; 00026 }
| std::list< const ObjectDescriptor * > * OMK::SimulatedObject::listDescendantsOfType | ( | ) |
list of descendants, of a certain type, of this simulated object in the simulation tree
Definition at line 29 of file OMKSimulatedObject.inl.
References getObjectDescriptor().
00030 { 00031 return getObjectDescriptor().template listDescendantsOfType< Type >(); 00032 }
isAncestor
| name | : the simulated object which could be an ancestor |
Definition at line 804 of file OMKSimulatedObject.cpp.
References OMK::ObjectDescriptor::getFathersObjectDescriptor(), OMK::ObjectDescriptor::getName(), and getObjectDescriptor().
Referenced by addInputAlias(), addSensitiveInputAlias(), and addSensitiveNotifyingInputAlias().
00805 { 00806 bool result = false ; 00807 const ObjectDescriptor * ancestorDescriptor = getObjectDescriptor().getFathersObjectDescriptor() ; 00808 while ( (ancestorDescriptor != NULL) && 00809 !result ) 00810 { 00811 if ( ancestorDescriptor->getName() == name) 00812 { 00813 result = true ; 00814 } 00815 ancestorDescriptor = ancestorDescriptor->getFathersObjectDescriptor() ; 00816 } 00817 return result ; 00818 }
| SimulatedObject * SimulatedObject::getFather | ( | ) | const [virtual] |
get the simulated object's father in the simulation tree if the simulated object has a father WARNING : if any other information than a pointer to the object simulating the father is needed, please use getFathersDescriptor() to access that information
Definition at line 228 of file OMKSimulatedObject.cpp.
References _controller, _objectDescriptor, OMK::ObjectDescriptor::getFathersObjectDescriptor(), OMK::ObjectDescriptor::getName(), and OMK::Controller::getPointerToSimulatedObjectNamed().
00228 { 00229 //refObjet is not always initialised in a distributed environment 00230 if ( _objectDescriptor.getFathersObjectDescriptor() != NULL ) 00231 { 00232 return _controller.getPointerToSimulatedObjectNamed(_objectDescriptor.getFathersObjectDescriptor()->getName()); 00233 } 00234 else 00235 { 00236 return NULL ; 00237 } 00238 }
| const ObjectDescriptor & SimulatedObject::getFathersDescriptor | ( | ) | const [virtual] |
get the name of the simulated object's father in the simulation tree
Definition at line 215 of file OMKSimulatedObject.cpp.
References _objectDescriptor, and OMK::ObjectDescriptor::getFathersObjectDescriptor().
00215 { 00216 if ( _objectDescriptor.getFathersObjectDescriptor () != NULL ) 00217 { 00218 return *_objectDescriptor.getFathersObjectDescriptor () ; 00219 } 00220 else 00221 { 00222 return _objectDescriptor ; 00223 } 00224 }
| const Name & SimulatedObject::getName | ( | ) | const [virtual] |
get the name of the simulated object
Definition at line 164 of file OMKSimulatedObject.cpp.
References _objectDescriptor, and OMK::ObjectDescriptor::getName().
Referenced by OMK::Controller::actOnSystemEvent(), addControlParameter(), addInput(), addInputAlias(), addOutput(), addOutputAlias(), addSensitiveInput(), addSensitiveInputAlias(), addSensitiveNotifyingInput(), addSensitiveNotifyingInputAlias(), OMK::FrameScheduler::addToScheduable(), OMK::PvmLocalObjectHandle::broadcastEvent(), OMK::PvmDuplicatedObjectHandle::broadcastEvent(), cancelRegistrationForSignal(), cancelRegistrationForSignalBy(), OMK::MKMHumano::computeParameters(), OMK::Controller::computeScheduling(), OMK::OutputNT::connect(), OMK::Input< T >::connect(), OMK::Input< T >::connectToControlParameter(), OMK::Vis::VisBase::createInput(), OMK::Controller::createLocalObject(), OMK::Controller::createObject(), OMK::Controller::createReferenceObjectHandle(), OMK::debugMsg(), OMK::Vis::VisBase::finish(), fireSignal(), fireValuedSignal(), OMK::Input< T >::get(), OMK::Output< T >::getDateOfLastExactValue(), OMK::Input< T >::getDateOfLastExactValue(), OMK::StaticHumano::getInitialiseSequence(), OMK::Output< T >::getLastExactValue(), OMK::Input< T >::getLastExactValue(), getPointerToOutputNamed(), OMK::DistributedController::getPointerToSimulatedObjectNamed(), OMK::Controller::getPointerToSimulatedObjectNamed(), OMK::MovingHumano::getVisualObjectPrm(), OMK::BasicHumano::getVisualObjectPrm(), OMK::Controller::hasEventsToProcess(), OMK::Controller::init(), OMK::UnInitialisedAttributeException::insertInStream(), OMK::Iii::SimpleConnectorT< Type >::isConnected(), OMK::Inp::EscListener::keyPressed(), OMK::Vis::VisObjectExtension::loadAnimatorParameters(), OMK::Vis::VisObjectExtension::loadObjectParameters(), OMK::HumanoPlayer::loadParameters(), OMK::MultiValuedEventSignalEmitterUtilT< T, ModelType >::loadParametersUtil(), OMK::ValuedEventSignalEmitterUtilT< T, ModelType >::loadParametersUtil(), OMK::Output< T >::localInsert(), OMK::PvmReferenceObjectHandle::makeSynchronisationMessage(), OMK::Controller::migrateObjectToProcess(), OMK::operator<(), OMK::Output< T >::Output(), OMK::PvmReferenceObjectHandle::packInitialValues(), OMK::Output< T >::printDebuggingInformation(), OMK::InputAlias< T >::printDebuggingInformation(), OMK::Input< T >::printDebuggingInformation(), OMK::Vis::VisBase::processAddVisualObjectEvent(), OMK::Controller::processDeleteEventOf(), OMK::DistributedController::processEvent(), OMK::Controller::processEvent(), OMK::DistributedController::processStartEventOf(), OMK::PvmController::PvmController(), OMK::Input< T >::realConnect(), OMK::DistributedController::receiveCancellationForSignal(), OMK::ReferenceObjectHandle::receiveEvent(), OMK::DistributedController::receiveRegistrationForSignal(), registerForSignal(), registerForSignalBy(), OMK::PvmMirrorObjectHandle::registerToReferenceObject(), OMK::FrameScheduler::removeFromScheduable(), OMK::FrameScheduler::schedule(), sendEvent(), OMK::Controller::sendInitialEventsTo(), OMK::PvmMirrorObjectHandle::sendRequestToReferenceObject(), sendValuedEvent(), OMK::Output< T >::set(), OMK::AbstractInput< Type >::setConnectable(), OMK::PvmMirrorObjectHandle::unpack(), and OMK::FrameScheduler::unschedule().
00165 { 00166 return _objectDescriptor.getName() ; 00167 }
| Controller & SimulatedObject::getController | ( | ) | const [virtual] |
get the controler of the simulated object
Definition at line 172 of file OMKSimulatedObject.cpp.
References _controller.
Referenced by OMK::Controller::actOnSystemEvent(), addOutputAlias(), cancelRegistrationForSignalBy(), OMK::HumanoRecorder::computeParameters(), OMK::OutputNT::connect(), OMK::Input< T >::connect(), OMK::Input< T >::connectToControlParameter(), OMK::ObjectDescriptor::createDescribedObject(), fireSignal(), fireValuedSignal(), OMK::Controller::hasEventsToProcess(), OMK::Iii::IConnector::IConnector(), OMK::Inp::EscListener::keyPressed(), OMK::PvmMirrorObjectHandle::linkToNewReferential(), OMK::EventSignalEmitterUtil::loadParametersUtil(), OMK::Output< T >::localGet(), OMK::PvmMirrorObjectHandle::PvmMirrorObjectHandle(), OMK::Inp::DistributedCameraListener::readConfigurationParameters(), OMK::Input< T >::realConnect(), registerForSignalBy(), OMK::PvmMirrorObjectHandle::registerToReferenceObject(), sendEvent(), OMK::PvmMirrorObjectHandle::sendRequestToReferenceObject(), sendValuedEvent(), OMK::Output< T >::set(), OMK::AbstractInput< Type >::setConnectable(), OMK::Output< T >::suggest(), OMK::PvmMirrorObjectHandle::unpack(), and OMK::ObjectHandle::~ObjectHandle().
00172 { 00173 return _controller; 00174 }
| ObjectHandle * SimulatedObject::getObjectHandle | ( | ) | const |
get the object handle. Usage by the kernel.
Definition at line 49 of file OMKSimulatedObject.cpp.
References _objectHandle.
Referenced by addEventListener(), cancelRegistrationForSignalBy(), OMK::DistributedController::createLocalObject(), fireSignal(), fireValuedSignal(), OMK::DistributedController::getPointerToSimulatedObjectNamed(), OMK::Controller::init(), insertInStream(), pack(), packAllValues(), OMK::GenericControlParameter< T, AncestorClass >::realSet(), registerEventListenerForEvent(), registerForSignalBy(), OMK::Controller::scheduleControlledObjects(), sendEvent(), OMK::SignalDispatcher::sendEventsForSignal(), sendValuedEvent(), and unregisterEventListener().
00050 { 00051 return _objectHandle ; 00052 }
| void SimulatedObject::setObjectHandle | ( | ObjectHandle * | objectHandle | ) |
set the object handle : feils if an object handle allready exists
Definition at line 56 of file OMKSimulatedObject.cpp.
References _objectHandle.
Referenced by OMK::ObjectHandle::ObjectHandle().
00057 { 00058 //OMASSERT ( _objectHandle == NULL ) ; // TDTD 09-05-2006 commentaire cause noyau Chadi : pour la migration 00059 _objectHandle = objectHandle ; 00060 }
| const ObjectDescriptor & SimulatedObject::getObjectDescriptor | ( | ) | const |
gain access to the object descriptor
Definition at line 64 of file OMKSimulatedObject.cpp.
References _objectDescriptor.
Referenced by OMK::PvmMirrorObjectHandle::cancelRegistrationForSignal(), OMK::MKMHumano::computeParameters(), OMK::Vis::VisBase::createInput(), OMK::debugMsg(), OMK::Controller::deleteObject(), OMK::Controller::deleteObjectHandle(), OMK::Controller::getPointerToDuplicatedObjectNamed(), OMK::DistributedController::getPointerToSimulatedObjectNamed(), OMK::ExtensibleSimulatedObject::init(), OMK::Clock::init(), isAncestor(), listBrothersOfType(), OMK::Controller::listBrothersOfType(), listDescendantsOfType(), OMK::Controller::listDescendantsOfType(), listSonsOfType(), OMK::Vis::VisObjectExtension::loadAnimatorParameters(), OMK::ObjectHandle::ObjectHandle(), OMK::operator<=(), OMK::ExtensibleSimulatedObject::postConstruction(), OMK::Vis::VisBase::processAddVisualObjectEvent(), OMK::Controller::processDeleteEventOf(), OMK::DistributedController::processEvent(), OMK::PvmMirrorObjectHandle::PvmMirrorObjectHandle(), OMK::PvmMirrorObjectHandle::receiveEvent(), OMK::PvmMirrorObjectHandle::receiveRegistrationForSignal(), OMK::Controller::sendInitialEventsTo(), and OMK::PvmMirrorObjectHandle::sendRequestToReferenceObject().
00064 { 00065 return _objectDescriptor ; 00066 }
| const NameToPointerMap< InputNT > & SimulatedObject::getInputTable | ( | ) | const [virtual] |
get a reference to the table of the simulated object's inputs
Definition at line 244 of file OMKSimulatedObject.cpp.
References _inputTable.
00245 { 00246 return _inputTable ; 00247 }
| const NameToPointerMap< OutputNT > & SimulatedObject::getOutputTable | ( | ) | const [virtual] |
get a reference to the table of the simulated object's outputs
Definition at line 249 of file OMKSimulatedObject.cpp.
References _outputTable.
00250 { 00251 return _outputTable ; 00252 }
| const NameToPointerMap< OutputNT > & SimulatedObject::getControlParameterTable | ( | ) | const [virtual] |
get a reference to the table of the simulated object's parameters
Definition at line 254 of file OMKSimulatedObject.cpp.
References _controlParameterTable.
00255 { 00256 return _controlParameterTable ; 00257 }
| const list< EventListener * > & SimulatedObject::getEventListeners | ( | ) | const [virtual] |
get a reference to the list of EventListeners
Definition at line 822 of file OMKSimulatedObject.cpp.
References _listOfEventListeners.
Referenced by OMK::ReferenceObjectHandle::ReferenceObjectHandle().
00823 { 00824 return _listOfEventListeners ; 00825 }
get a pointer to an input
| inputName | the name of the input looked for |
Definition at line 156 of file OMKSimulatedObject.cpp.
References _inputTable.
Referenced by OMK::OutputNT::connect(), and ~SimulatedObject().
00157 { 00158 return _inputTable.getObjectOfIndex (nomAtt) ; 00159 }
get a pointer to an output
| outputName | the name of the output looked for |
Definition at line 143 of file OMKSimulatedObject.cpp.
References _outputTable, getName(), OMK_DEBUG_OMK_EXEC, and OMTRACEID.
Referenced by OMK::Input< T >::connect(), and ~SimulatedObject().
00144 { 00145 OutputNT * ref = _outputTable.getObjectOfIndex (nomAtt) ; 00146 if (ref == NULL) { 00147 OMTRACEID( OMK_DEBUG_OMK_EXEC, "SimulatedObject::getPointerToOutputNamed: \"" 00148 << nomAtt << "\" is an unknown output for object \"" 00149 << getName() << "\"" ) ; 00150 } 00151 return ref ; 00152 }
| OutputNT * SimulatedObject::getPointerToControlParameterNamed | ( | const Name & | parameterName | ) | const [virtual] |
get a pointer to a control parameter
| parameterName | the name of the parameter looked for |
Definition at line 136 of file OMKSimulatedObject.cpp.
References _controlParameterTable.
Referenced by OMK::Input< T >::connectToControlParameter(), and ~SimulatedObject().
00137 { 00138 return _controlParameterTable.getObjectOfIndex (nomAtt) ; 00139 }
| const ConfigurationParameterDescriptor * SimulatedObject::getConfigurationParameters | ( | ) | const [virtual] |
get a pointer to the structure describing our configuration parameters
Definition at line 239 of file OMKSimulatedObject.cpp.
References _objectDescriptor, and OMK::ObjectDescriptor::getConfigurationParameters().
Referenced by OMK::MKMHumano::computeParameters(), OMK::Controller::Controller(), OMK::StaticHumano::getInitialiseSequence(), OMK::Iii::IConnector::IConnector(), OMK::PluginsLoaderClass::init(), OMK::ExtensibleSimulatedObject::init(), OMK::Clock::init(), OMK::Inp::DistributedCameraListener::readConfigurationParameters(), and OMK::IAttribute::setOwner().
00239 { 00240 return _objectDescriptor.getConfigurationParameters(); 00241 }
| void SimulatedObject::postConstruction | ( | ) | [virtual] |
Complete constructor the object.
Use this method as polymorph. it is called systematically after the object constructor. Can be use to dispatch outputs construction for exmaple.
Reimplemented in OMK::ExtensibleSimulatedObject.
Definition at line 177 of file OMKSimulatedObject.cpp.
| void SimulatedObject::init | ( | ) | [virtual] |
initialise the object.
Use this member function for any initilisation than can only be done when all the simulated objects have been created. In particular, plugging the input of the objects should be done here. By default, this member function calls the initialisation of the associated computational object.
Reimplemented in OMK::Clock, OMK::Controller, OMK::ExtensibleSimulatedObject, OMK::PvmController, OMK::Vis::VisBase, and OMK::Inp::DistributedCameraListener.
Definition at line 181 of file OMKSimulatedObject.cpp.
Referenced by OMK::ReferenceObjectHandle::init(), and OMK::ReferenceObjectHandle::initAfterMorphose().
| void SimulatedObject::emigrate | ( | ) | [virtual] |
| void SimulatedObject::immigrate | ( | Event * | event | ) | [virtual] |
Definition at line 190 of file OMKSimulatedObject.cpp.
Referenced by OMK::DistributedController::processEvent().
| void SimulatedObject::compute | ( | ) | [virtual] |
compute evolution of this object.
Reimplemented in OMK::Clock, OMK::Controller, OMK::ExtensibleSimulatedObject, and OMK::Inp::DistributedCameraListener.
Definition at line 196 of file OMKSimulatedObject.cpp.
Referenced by OMK::ReferenceObjectHandle::compute().
| void SimulatedObject::finish | ( | ) | [virtual] |
finish calculation of evolution.
by default, this member function does nothing. Finish is usefull in the event of having the simulation restarted whitout complete destruction of the objects
Reimplemented in OMK::Controller, OMK::ExtensibleSimulatedObject, OMK::PvmController, OMK::Vis::VisBase, OMK::Inp::DistributedCameraListener, and OMK::MKMHumano.
Definition at line 202 of file OMKSimulatedObject.cpp.
Referenced by OMK::ExtensibleSimulatedObject::finish().
| void SimulatedObject::extract | ( | std::istream & | in = std::cin |
) | [virtual] |
extract pertinant information for this object from an input stream
| in | the input stream the data is extracted from. By default, this method enables outputs and control paramters to be updated in case the current simulated object is just a miroir of the simulated object doing the calculations |
Implements OMK::Flowable.
Definition at line 371 of file OMKSimulatedObject.cpp.
References _controlParameterTable, _outputTable, OMK_DEBUG_OMK_MULTI, and OMTRACEID.
00372 { 00373 OMTRACEID( OMK_DEBUG_OMK_MULTI, "SimulatedObject:" << this << ":extract" ) ; 00374 NameToPointerMap<OutputNT>::iterator pOutput; // iterateur 00375 OutputNT *outputCourante; 00376 NameToPointerMap<OutputNT>::iterator pParam; // iterateur 00377 OutputNT *paramCourant; 00378 00379 // Pour toutes les outputs, on stocke 00380 for(pOutput= _outputTable.begin(); pOutput!= _outputTable.end(); pOutput++) 00381 { 00382 outputCourante = (*pOutput).second; 00383 in >> *outputCourante; 00384 } 00385 bool avecParam; 00386 in >> avecParam; 00387 if (avecParam) 00388 { 00389 OMTRACEID( OMK_DEBUG_OMK_MULTI, "SimulatedObject:" << this << ":extract extract parameters" ) ; 00390 for(pParam= _controlParameterTable.begin(); pParam!= _controlParameterTable.end(); pParam++) 00391 { 00392 paramCourant = (*pParam).second; 00393 in >> *paramCourant; 00394 OMTRACEID( OMK_DEBUG_OMK_MULTI, (*pParam).first ) ; 00395 } 00396 } 00397 OMTRACEID( OMK_DEBUG_OMK_MULTI, "SimulatedObject:" << this << ":extract done " ) ; 00398 }
| void SimulatedObject::insertInStream | ( | std::ostream & | out = std::cout |
) | const [virtual] |
insert pertinant information for this object in an output stream
| out,the | output stream the data is written to. By default, this method enables outputs and control paramters to be updated in case the current simulated object is a referential that has to update all it's mirrors |
Implements OMK::Flowable.
Definition at line 597 of file OMKSimulatedObject.cpp.
References _controlParameterTable, _outputTable, OMK::ObjectHandle::controlParametersChanged(), getObjectHandle(), getSimulatedDate(), OMK::Controller::initialSimulationDate, OMK_DEBUG_OMK_MULTI, and OMTRACEID.
00598 { 00599 NameToPointerMap<OutputNT>::const_iterator pOutput; // iterateur 00600 OutputNT * outputCourante; 00601 NameToPointerMap<OutputNT>::const_iterator pParam; // iterateur 00602 OutputNT *paramCourant; 00603 OMTRACEID( OMK_DEBUG_OMK_MULTI, "SimulatedObject::insertInStream" ) ; 00604 00605 // Pour toutes les outputs, on stocke 00606 for(pOutput= _outputTable.begin(); pOutput!= _outputTable.end(); pOutput++) 00607 { 00608 outputCourante = (*pOutput).second; 00609 OMTRACEID( OMK_DEBUG_OMK_MULTI, (*pOutput).first << endl << *outputCourante ) ; 00610 out << *outputCourante << " "; 00611 } 00612 bool mettreParam = getObjectHandle()->controlParametersChanged() 00613 || (getSimulatedDate()==Controller::initialSimulationDate) ; 00614 OMTRACEID( OMK_DEBUG_OMK_MULTI, mettreParam ) ; 00615 out << mettreParam << " "; 00616 if(mettreParam) 00617 { 00618 for(pParam= _controlParameterTable.begin(); pParam!= _controlParameterTable.end(); pParam++) 00619 { 00620 paramCourant = (*pParam).second; 00621 OMTRACEID( OMK_DEBUG_OMK_MULTI, (*pParam).first ) ; 00622 out << *paramCourant << " "; 00623 } 00624 } 00625 OMTRACEID( OMK_DEBUG_OMK_MULTI, "SimulatedObject:" << this << ":insertInStream done" ) ; 00626 }
| void SimulatedObject::unpack | ( | IncomingSynchronisationMessage & | ) | [virtual] |
unpack an update from a message
Reimplemented from OMK::Flowable.
Definition at line 471 of file OMKSimulatedObject.cpp.
References _controlParameterTable, _outputTable, OMK::SynchronisationMessage::controlParameters, OMK::SynchronisationMessage::endOfSynchronisationFragment, OMK::SynchronisationMessage::noControlParameters, OMASSERT, OMK_DEBUG_OMK_MULTI, OMTRACEID, and OMK::Name::unpack().
Referenced by OMK::PvmController::parseSynchronisationMessage(), OMK::PvmReferenceObjectHandle::unpack(), and OMK::PvmMirrorObjectHandle::unpack().
00472 { 00473 OMTRACEID( OMK_DEBUG_OMK_MULTI, "SimulatedObject:"<< this <<":unpack" ) ; 00474 Name attributeName ; 00475 NameToPointerMap<OutputNT>::iterator pOutput = _outputTable.begin(); 00476 00477 attributeName.unpack( in ) ; 00478 while( (attributeName != SynchronisationMessage::controlParameters) 00479 && (attributeName != SynchronisationMessage::noControlParameters) ) 00480 { 00481 if ( pOutput->first == attributeName ) 00482 { 00483 (pOutput->second)->unpack(in) ; 00484 ++pOutput ; 00485 } 00486 else 00487 { 00488 do 00489 { 00490 ++pOutput ; 00491 OMASSERT ( pOutput != _outputTable.end() ) ;// a new output has been added : not accepted 00492 } while ( pOutput->first != attributeName ) ; 00493 00494 (pOutput->second)->unpack ( in ) ; 00495 ++pOutput ; 00496 } 00497 attributeName.unpack ( in ) ; 00498 } 00499 00500 if (attributeName == SynchronisationMessage::controlParameters) 00501 { 00502 //the control parameters have been added to the synchronisation message 00503 pOutput = _controlParameterTable.begin(); 00504 attributeName.unpack ( in ) ; 00505 while ( attributeName != SynchronisationMessage::endOfSynchronisationFragment ) 00506 { 00507 if ( pOutput->first == attributeName ) 00508 { 00509 (pOutput->second)->unpack( in ) ; 00510 ++pOutput ; 00511 } 00512 else 00513 { 00514 do 00515 { 00516 ++pOutput ; 00517 OMASSERT ( pOutput != _controlParameterTable.end() ) ;// a new control parameter has been added : not accepted 00518 } while ( pOutput->first != attributeName ) ; 00519 00520 (pOutput->second)->unpack (in) ; 00521 ++pOutput ; 00522 } 00523 attributeName.unpack ( in ) ; 00524 } 00525 } 00526 else 00527 { // consume the OMKPvmMessage::endOfSyncronisationMessage 00528 attributeName.unpack ( in ) ; 00529 } 00530 }
| void SimulatedObject::unpackAllValues | ( | IncomingSynchronisationMessage & | ) | [virtual] |
unpack all necessary info if the object is a mirror from a message
Definition at line 533 of file OMKSimulatedObject.cpp.
References _controlParameterTable, _outputTable, OMK::SynchronisationMessage::controlParameters, OMK::SynchronisationMessage::endOfSynchronisationFragment, OMK::SynchronisationMessage::noControlParameters, OMASSERT, OMK_DEBUG_OMK_MULTI, OMTRACEID, and OMK::Name::unpack().
Referenced by OMK::PvmMirrorObjectHandle::unpack().
00534 { 00535 OMTRACEID( OMK_DEBUG_OMK_MULTI, "SimulatedObject:"<< this <<":unpackAllValues" ) ; 00536 Name attributeName ; 00537 NameToPointerMap<OutputNT>::iterator pOutput = _outputTable.begin(); 00538 00539 attributeName.unpack( in ) ; 00540 while( (attributeName != SynchronisationMessage::controlParameters) 00541 && (attributeName != SynchronisationMessage::noControlParameters) ) 00542 { 00543 if ( pOutput->first == attributeName ) 00544 { 00545 (pOutput->second)->unpackAllValues(in) ; 00546 ++pOutput ; 00547 } 00548 else 00549 { 00550 do 00551 { 00552 ++pOutput ; 00553 OMASSERT ( pOutput != _outputTable.end() ) ;// a new output has been added : not accepted 00554 } while ( pOutput->first != attributeName ) ; 00555 00556 (pOutput->second)->unpackAllValues ( in ) ; 00557 ++pOutput ; 00558 } 00559 attributeName.unpack ( in ) ; 00560 } 00561 00562 if (attributeName == SynchronisationMessage::controlParameters) 00563 { 00564 //the control parameters have been added to the synchronisation message 00565 pOutput = _controlParameterTable.begin(); 00566 attributeName.unpack ( in ) ; 00567 while ( attributeName != SynchronisationMessage::endOfSynchronisationFragment ) 00568 { 00569 if ( pOutput->first == attributeName ) 00570 { 00571 (pOutput->second)->unpackAllValues( in ) ; 00572 ++pOutput ; 00573 } 00574 else 00575 { 00576 do 00577 { 00578 ++pOutput ; 00579 OMASSERT ( pOutput != _controlParameterTable.end() ) ;// a new control parameter has been added : not accepted 00580 } while ( pOutput->first != attributeName ) ; 00581 00582 (pOutput->second)->unpackAllValues (in) ; 00583 ++pOutput ; 00584 } 00585 attributeName.unpack ( in ) ; 00586 } 00587 } 00588 else 00589 { 00590 // consume the OMKPvmMessage::endOfSyncronisationMessage 00591 attributeName.unpack ( in ) ; 00592 } 00593 }
| void SimulatedObject::pack | ( | OutgoingSynchronisationMessage & | ) | const [virtual] |
pack update information in a message
Reimplemented from OMK::Flowable.
Definition at line 401 of file OMKSimulatedObject.cpp.
References _controlParameterTable, _outputTable, OMK::SynchronisationMessage::controlParameters, OMK::ObjectHandle::controlParametersChanged(), OMK::SynchronisationMessage::endOfSynchronisationFragment, getObjectHandle(), getSimulatedDate(), OMK::Controller::initialSimulationDate, OMK::SynchronisationMessage::noControlParameters, OMASSERT, OMK_DEBUG_OMK_MULTI, and OMTRACEID.
00402 { 00403 //make sure the object has been encapsulated in an object handle 00404 OMASSERT( getObjectHandle() != NULL ) ; 00405 OMTRACEID( OMK_DEBUG_OMK_MULTI, "SimulatedObject:" << this << ":pack" ) ; 00406 00407 // store the value of all outputs 00408 for( NameToPointerMap<OutputNT>::const_iterator pOutput = _outputTable.begin(); 00409 pOutput != _outputTable.end(); 00410 ++pOutput) 00411 { 00412 OMTRACEID( OMK_DEBUG_OMK_MULTI, (*pOutput).first ) ; 00413 pOutput->second->pack (out) ; 00414 } 00415 00416 bool mettreParam = ( getObjectHandle()->controlParametersChanged() ) || 00417 (getSimulatedDate() == Controller::initialSimulationDate) ; 00418 00419 OMTRACEID( OMK_DEBUG_OMK_MULTI, "SimulatedObject:" << this << ":pack: " << ( mettreParam ? "packing control parameters" : "control parameters not packed" ) ); 00420 00421 if(mettreParam) 00422 { 00423 out << SynchronisationMessage::controlParameters; 00424 for( NameToPointerMap<OutputNT>::const_iterator pParam= _controlParameterTable.begin(); 00425 pParam!= _controlParameterTable.end(); 00426 pParam++) 00427 { 00428 OMTRACEID( OMK_DEBUG_OMK_MULTI, (*pParam).first ) ; 00429 (*pParam).second->pack(out) ; 00430 } 00431 } 00432 else 00433 { 00434 out << SynchronisationMessage::noControlParameters; 00435 } 00436 OMTRACEID( OMK_DEBUG_OMK_MULTI, "SimulatedObject:" << this << ":pack done " ) ; 00437 out << SynchronisationMessage::endOfSynchronisationFragment ; 00438 }
| void SimulatedObject::packAllValues | ( | OutgoingSynchronisationMessage & | ) | const [virtual] |
pack initial information in a message
Definition at line 440 of file OMKSimulatedObject.cpp.
References _controlParameterTable, _outputTable, OMK::SynchronisationMessage::controlParameters, OMK::SynchronisationMessage::endOfSynchronisationFragment, getObjectHandle(), OMASSERT, OMK_DEBUG_OMK_MULTI, and OMTRACEID.
Referenced by OMK::PvmReferenceObjectHandle::packInitialValues().
00441 { 00442 //make sure the object has been encapsulated in an object handle 00443 OMASSERT (getObjectHandle() != NULL) ; 00444 00445 OMTRACEID( OMK_DEBUG_OMK_MULTI, "SimulatedObject:"<< this <<":packAllValues" ) ; 00446 00447 // store the value of all outputs 00448 for( NameToPointerMap<OutputNT>::const_iterator pOutput = _outputTable.begin(); 00449 pOutput != _outputTable.end(); 00450 ++pOutput) 00451 { 00452 OMTRACEID( OMK_DEBUG_OMK_MULTI, (*pOutput).first ) ; 00453 pOutput->second->packAllValues (out) ; 00454 } 00455 00456 OMTRACEID( OMK_DEBUG_OMK_MULTI, "SimulatedObject:"<< this <<":pack: packing control parameters" ) ; 00457 out<<SynchronisationMessage::controlParameters; 00458 for( NameToPointerMap<OutputNT>::const_iterator pParam = _controlParameterTable.begin(); 00459 pParam!= _controlParameterTable.end(); 00460 pParam++) 00461 { 00462 OMTRACEID( OMK_DEBUG_OMK_MULTI, (*pParam).first ) ; 00463 (*pParam).second->packAllValues(out) ; 00464 } 00465 00466 OMTRACEID( OMK_DEBUG_OMK_MULTI, "SimulatedObject:"<< this <<":pack done " ) ; 00467 out << SynchronisationMessage::endOfSynchronisationFragment ; 00468 }
| void SimulatedObject::prepareEventProcessing | ( | std::list< Event * > & | ) | [virtual] |
prepareEventProcessing called before any events are processed if any clean up is needed after the preceeding simulation step
Definition at line 354 of file OMKSimulatedObject.cpp.
Referenced by OMK::ReferenceObjectHandle::processEvents().
process an event for this object.
the event will be automatically deleted if the return value of the call is true, otherwise deletion becomes the responsability of the object
Reimplemented in OMK::DistributedController, OMK::Clock, OMK::Controller, and OMK::Vis::VisBase.
Definition at line 358 of file OMKSimulatedObject.cpp.
Referenced by OMK::Vis::VisBase::processEvent(), OMK::Clock::processEvent(), and OMK::ReferenceObjectHandle::processEvents().
| void SimulatedObject::eventsProcessed | ( | std::list< Event * > & | ) | [virtual] |
eventsProcessed called once all the events have been handled to processEvent, and those who have been succesfully processed (processEvent having return true ) have been destroyed
Definition at line 362 of file OMKSimulatedObject.cpp.
Referenced by OMK::ReferenceObjectHandle::processEvents().
| bool SimulatedObject::processEventsASAP | ( | ) | const [virtual] |
event processing mode.
Definition at line 347 of file OMKSimulatedObject.cpp.
Referenced by OMK::ReferenceObjectHandle::receiveEvent().
00348 { 00349 //default mode : processEvents at the object's frequency. 00350 return false ; 00351 }
| void SimulatedObject::addEventListener | ( | EventListener & | ) | [virtual] |
Event listener registration.
Called to register the event listener in the object. Most of the listeners register themself in their constructor. The referenced event listener can be deleted, it will call automatically unregisterEventListener.
Definition at line 837 of file OMKSimulatedObject.cpp.
References _listOfEventListeners, getObjectHandle(), and OMK::EventListener::registerEvents().
Referenced by OMK::ChangedControlParameterEventListener< T >::ChangedControlParameterEventListener(), OMK::EventListenerCallBack< CallerClass >::EventListenerCallBack(), OMK::InputConnectionEventListener< T >::InputConnectionEventListener(), OMK::Inp::InputExtension::loadExtensionParameters(), and OMK::ValuedEventListenerCallBack< CallerClass, PrmType >::ValuedEventListenerCallBack().
00838 { 00839 // To avoid twice registration of the same event handler 00840 if( find(_listOfEventListeners.begin(), _listOfEventListeners.end(), & eventListener ) == _listOfEventListeners.end() ) 00841 { 00842 _listOfEventListeners.push_front( &eventListener ) ; 00843 if( getObjectHandle() ) 00844 { 00845 eventListener.registerEvents() ; 00846 } 00847 } 00848 }
| void SimulatedObject::registerEventListenerForEvent | ( | EventListener & | eventListener, | |
| const EventIdentifier & | eventId | |||
| ) |
Event listener registration for an event id.
Called by the event listener in its registerEvents for registration of the eventId listened to.
Definition at line 850 of file OMKSimulatedObject.cpp.
References getObjectHandle(), OMASSERT, and OMK::ObjectHandle::registerEventListenerForEvent().
Referenced by OMK::ValuedEventListenerCallBack< CallerClass, PrmType >::registerEvents(), OMK::Inp::InputCreatorListener::registerEvents(), OMK::InputConnectionEventListener< T >::registerEvents(), OMK::EventListenerCallBack< CallerClass >::registerEvents(), and OMK::ChangedControlParameterEventListener< T >::registerEvents().
00852 { 00853 //this member function should only be called by event listeners when registering the events they are associated to 00854 //this registration process is initiated during the creation of the assocaited object handle 00855 // or after its creation 00856 //therefore, the following assertion should allways be verified 00857 OMASSERT( getObjectHandle() ); 00858 00859 getObjectHandle()->registerEventListenerForEvent( eventListener , eventId ) ; 00860 }
| void SimulatedObject::unregisterEventListener | ( | EventListener & | eventListener | ) |
Unregistration of an event listener for the simulation object.
| eventListener | The event listener to unreference. |
Definition at line 862 of file OMKSimulatedObject.cpp.
References _listOfEventListeners, getObjectHandle(), OMASSERT, and OMK::ObjectHandle::unregisterEventListener().
Referenced by OMK::EventListener::~EventListener().
00863 { 00864 std::list <EventListener *>::iterator listener = find(_listOfEventListeners.begin(), _listOfEventListeners.end(), & eventListener ) ; 00865 _listOfEventListeners.erase( listener ) ; 00866 //this member function is only called by the destructor of the event listeners 00867 OMASSERT( getObjectHandle() ); 00868 00869 getObjectHandle()->unregisterEventListener( eventListener ) ; 00870 }
| void SimulatedObject::fireSignal | ( | const EventIdentifier & | sig | ) |
fire a signal wich will be seen by anybody registred for that signal
| sig | : the event identifier to be fired |
Definition at line 632 of file OMKSimulatedObject.cpp.
References OMK::Controller::broadcastEventsForSignal(), getController(), getName(), getObjectHandle(), getSimulatedDate(), OMTRACE, and OMK::ObjectHandle::sendEventsForSignal().
Referenced by OMK::Controller::computeScheduling(), and OMK::EventSignalEmitterUtil::sendUtil().
00633 { 00634 Event event(sig,getSimulatedDate(),getName(),getName()) ; 00635 //does firing a signal during creation have any sense ? yes 00636 00637 00638 if ( dynamic_cast<ReferenceObjectHandle *> ( getObjectHandle()) != NULL) { 00639 if (getObjectHandle() != NULL ) 00640 { 00641 getObjectHandle()->sendEventsForSignal( event , sig ) ; 00642 } 00643 else 00644 { 00645 // no registration can have taken place, as this should only happen at object creation, 00646 // so just broadcast the signal 00647 getController().broadcastEventsForSignal ( event, sig ) ; 00648 } 00649 } 00650 else OMTRACE("ERREUR No send Event when SimObj DEAD"); 00651 }
| void OMK::SimulatedObject::fireValuedSignal | ( | const EventIdentifier & | sig, | |
| const UserType & | value | |||
| ) |
fire a signal which carries an associated value
| sig | : the event identifier to be fired | |
| value | : the value carried by the signal |
Definition at line 35 of file OMKSimulatedObject.inl.
References OMK::Controller::broadcastEventsForSignal(), getController(), getName(), getObjectHandle(), getSimulatedDate(), and OMK::ObjectHandle::sendEventsForSignal().
Referenced by OMK::BasicHumano::computeParameters(), OMK::IAttributeT< PrmType, ModelType, AccessorType >::fireIdAndValue(), OMK::IAttributeT< PrmType, ModelType, AccessorType >::fireValue(), OMK::DistributedController::getPointerToSimulatedObjectNamed(), OMK::Vis::VisObjectExtension::loadAnimatorParameters(), OMK::BasicHumano::loadParameters(), OMK::Inp::DistributedCameraOgreListener::postComputeParameters(), OMK::Vis::VisBase::processAddVisualObjectEvent(), OMK::Controller::processDeleteEventOf(), OMK::DistributedController::processEvent(), OMK::Controller::processEvent(), OMK::MultiValuedEventSignalEmitterUtilT< T, ModelType >::sendUtil(), and OMK::ValuedEventSignalEmitterUtilT< T, ModelType >::sendUtil().
00037 { 00038 ValuedEvent< UserType > event( sig, getSimulatedDate(), getName(), 00039 getName(), value) ; 00040 if( getObjectHandle() != 0 ) 00041 { 00042 getObjectHandle()->sendEventsForSignal( event , sig ) ; 00043 } 00044 else 00045 { 00046 getController().broadcastEventsForSignal( event, sig ) ; 00047 } 00048 }
| bool SimulatedObject::registerForSignalBy | ( | const EventIdentifier & | sig, | |
| const Name & | producer | |||
| ) | [virtual] |
register for a signal fired by a particular simulated object
| sig | the identifier of the signal registered, which will be the event identifier of the event generated | |
| producer | the object to whom one is registering |
Definition at line 653 of file OMKSimulatedObject.cpp.
Referenced by OMK::IAttribute::activateConnectBySignal(), OMK::IAttribute::activateGetBySignal(), OMK::IAttribute::activateSetBySignal(), OMK::IAttribute::activateSetBySignalOf(), OMK::HumanoRecorder::loadParameters(), OMK::loadSignalRegistrationParameters(), OMK::PvmController::PvmController(), OMK::Vis::VisBase::registerEventPlug(), and registerForSignalBy().
00655 { 00656 return registerForSignalBy ( sig, producer, sig ) ; 00657 }
| bool SimulatedObject::registerForSignalBy | ( | const EventIdentifier & | sig, | |
| const Name & | producer, | |||
| const EventIdentifier & | eventId | |||
| ) | [virtual] |
register for a signal fired by a particular simulated object
| sig | the identifier of the signal registered | |
| producer | the object to whom one is registering | |
| eventId | the event identifier to be sent when sig is generated (== sig by default) |
Definition at line 661 of file OMKSimulatedObject.cpp.
References _controller, OMK::Controller::addToPendingRegistrations(), getController(), getName(), OMK::Controller::getPointerToSimulatedObjectNamed(), and registerForSignalBy().
00664 { 00665 SimulatedObject * pointerToProducer ; 00666 pointerToProducer = _controller.getPointerToSimulatedObjectNamed ( producer ); 00667 if (pointerToProducer != NULL) 00668 { 00669 return registerForSignalBy(sig, pointerToProducer, eventId); 00670 } 00671 else 00672 { 00673 return getController().addToPendingRegistrations ( sig , producer, eventId, getName() ) ; 00674 } 00675 }
| bool SimulatedObject::registerForSignalBy | ( | const EventIdentifier & | sig, | |
| SimulatedObject * | producer | |||
| ) | [virtual] |
register for a signal fired by a particular simulated object
| sig | the identifier of the signal registered, which will be the event identifier of the event generated | |
| producer | the object to whom one is registering |
Definition at line 679 of file OMKSimulatedObject.cpp.
References registerForSignalBy().
00681 { 00682 return registerForSignalBy ( sig , producer , sig ) ; 00683 }
| bool SimulatedObject::registerForSignalBy | ( | const EventIdentifier & | sig, | |
| SimulatedObject & | producer | |||
| ) | [virtual] |
register for a signal fired by a particular simulated object
| sig | the identifier of the signal registered, which will be the event identifier of the event generated | |
| producer | the object to whom one is registering |
Definition at line 687 of file OMKSimulatedObject.cpp.
References registerForSignalBy().
00689 { 00690 return registerForSignalBy ( sig , producer , sig ) ; 00691 }
| bool SimulatedObject::registerForSignalBy | ( | const EventIdentifier & | sig, | |
| SimulatedObject * | producer, | |||
| const EventIdentifier & | eventId | |||
| ) | [virtual] |
register for a signal fired by a particular simulated object
| sig | the identifier of the signal registered | |
| producer | the object to whom one is registering | |
| eventId | the event identifier to be sent when sig is generated |
Definition at line 695 of file OMKSimulatedObject.cpp.
References OMK::Controller::addToPendingRegistrations(), getController(), getName(), getObjectHandle(), OMASSERT, and OMK::ObjectHandle::receiveRegistrationForSignal().
00698 { 00699 OMASSERT ( producer != NULL ) ; 00700 //unless registring for oneself during creation, the next if branch should allways be verified 00701 if (producer->getObjectHandle() != NULL) 00702 { 00703 return producer->getObjectHandle()->receiveRegistrationForSignal ( sig, getName(), eventId ) ; 00704 } 00705 else 00706 { 00707 return getController().addToPendingRegistrations (sig, 00708 producer->getName() , 00709 eventId, 00710 getName() ) ; 00711 } 00712 }
| bool SimulatedObject::registerForSignalBy | ( | const EventIdentifier & | sig, | |
| SimulatedObject & | producer, | |||
| const EventIdentifier & | eventId | |||
| ) | [virtual] |
register for a signal fired by a particular simulated object
| sig | the identifier of the signal registered | |
| producer | the object to whom one is registering | |
| eventId | the event identifier to be sent when sig is generated |
Definition at line 716 of file OMKSimulatedObject.cpp.
References OMK::Controller::addToPendingRegistrations(), getController(), getName(), getObjectHandle(), and OMK::ObjectHandle::receiveRegistrationForSignal().
00719 { 00720 if (producer.getObjectHandle() != NULL) 00721 { 00722 //unless registring for oneself during creation, the next if branch should allways be verified 00723 return producer.getObjectHandle()->receiveRegistrationForSignal ( sig, getName(), eventId ) ; 00724 } 00725 else 00726 { 00727 return getController().addToPendingRegistrations (sig, 00728 producer.getName(), 00729 eventId, 00730 getName() ) ; 00731 } 00732 }
| bool SimulatedObject::registerForSignal | ( | const EventIdentifier & | sig | ) | [virtual] |
register for a particular signal fired by anybody
| sig | the identifier of the signal registered, which will be the event identifier of the event generated |
Definition at line 736 of file OMKSimulatedObject.cpp.
References _controller, getName(), and OMK::Controller::receiveRegistrationForSignal().
Referenced by OMK::IAttribute::activateConnectBySignal(), OMK::IAttribute::activateGetBySignal(), OMK::IAttribute::activateSetBySignal(), OMK::IAttribute::activateSetBySignalOf(), OMK::Vis::VisBase::init(), OMK::EventSignalEmitterUtil::loadParametersUtil(), OMK::loadSignalRegistrationParameters(), and OMK::Vis::VisBase::registerEventPlug().
00737 { 00738 return _controller.receiveRegistrationForSignal ( sig, getName(), sig); 00739 }
| bool SimulatedObject::registerForSignal | ( | const EventIdentifier & | sig, | |
| const EventIdentifier & | eventId | |||
| ) | [virtual] |
register for a particular signal fired by anybody
| sig | the identifier of the signal registered | |
| eventId | the event identifier to be sent when sig is generated |
Definition at line 743 of file OMKSimulatedObject.cpp.
References _controller, getName(), and OMK::Controller::receiveRegistrationForSignal().
00745 { 00746 return _controller.receiveRegistrationForSignal ( sig, getName(), eventId ); 00747 }
| bool SimulatedObject::cancelRegistrationForSignalBy | ( | const EventIdentifier & | sig, | |
| const Name & | producer | |||
| ) | [virtual] |
cancel registration for a signal fired by a particular simulated object
| sig | the identifier of the signal being canceled | |
| producer | the object to whom one is canceling registration |
Definition at line 751 of file OMKSimulatedObject.cpp.
References _controller, getController(), getName(), OMK::Controller::getPointerToSimulatedObjectNamed(), and OMK::Controller::removeFromPendingRegistrations().
00751 { 00752 SimulatedObject * pointerToProducer ; 00753 pointerToProducer = _controller.getPointerToSimulatedObjectNamed( producer ); 00754 if (pointerToProducer != NULL) 00755 { 00756 return cancelRegistrationForSignalBy(sig,pointerToProducer); 00757 } 00758 else 00759 { 00760 return getController().removeFromPendingRegistrations ( sig, producer, getName() ) ; 00761 } 00762 }
| bool SimulatedObject::cancelRegistrationForSignalBy | ( | const EventIdentifier & | sig, | |
| SimulatedObject * | producer | |||
| ) | [virtual] |
cancel registration for a signal fired by a particular simulated object
| sig | the identifier of the signal being canceled | |
| producer | the object to whom one is canceling registration |
Definition at line 764 of file OMKSimulatedObject.cpp.
References OMK::ObjectHandle::cancelRegistrationForSignal(), getController(), getName(), getObjectHandle(), OMASSERT, and OMK::Controller::removeFromPendingRegistrations().
00765 { 00766 OMASSERT ( producer != NULL ) ; 00767 //unless canceling a registration for oneself during creation, the next if sould be verified 00768 if ( producer->getObjectHandle() != NULL ) 00769 { 00770 return producer->getObjectHandle()->cancelRegistrationForSignal ( sig, getName() ) ; 00771 } 00772 else 00773 { 00774 return getController().removeFromPendingRegistrations (sig, producer->getName(), getName() ) ; 00775 } 00776 }
| bool SimulatedObject::cancelRegistrationForSignalBy | ( | const EventIdentifier & | sig, | |
| SimulatedObject & | producer | |||
| ) | [virtual] |
cancel registration for a signal fired by a particular simulated object
| sig | the identifier of the signal being canceled | |
| producer | the object to whom one is canceling registration |
Definition at line 778 of file OMKSimulatedObject.cpp.
References OMK::ObjectHandle::cancelRegistrationForSignal(), getController(), getName(), getObjectHandle(), and OMK::Controller::removeFromPendingRegistrations().
00779 { 00780 //unless canceling a registration for oneself during creation, the next assertion sould be verified 00781 if ( producer.getObjectHandle() != NULL ) 00782 { 00783 return producer.getObjectHandle()->cancelRegistrationForSignal ( sig, getName() ) ; 00784 } 00785 else 00786 { 00787 return getController().removeFromPendingRegistrations (sig, producer.getName(), getName() ) ; 00788 } 00789 }
| bool SimulatedObject::cancelRegistrationForSignal | ( | const EventIdentifier & | sig | ) | [virtual] |
cancel registration for a particular signal fired by anybody
| sig | the identifier of the signal cancelled |
Definition at line 792 of file OMKSimulatedObject.cpp.
References _controller, getName(), and OMK::Controller::receiveCancellationForSignal().
Referenced by OMK::Vis::VisBase::finish().
00793 { 00794 return _controller.receiveCancellationForSignal(sig,getName()); 00795 }
| Input< Type > & OMK::SimulatedObject::addInput | ( | const Name & | inputName, | |
| bool | makeConnectable = false, |
|||
| int | precisionLevel = OMK::Type::PolatorNT::defaultPrecisionLevel | |||
| ) |
add a input to the simulated object
| inputName | name of the added input | |
| makeConnectable | allow other simulated objects to change the connection of the created input | |
| precisionLevel | quality of the polations associated with the created input |
Definition at line 51 of file OMKSimulatedObject.inl.
References _controller, _inputTable, OMK::debugMsg(), getName(), OMK_DEBUG_OMK_EXEC, and OMTRACEID.
00054 { 00055 InputNT *redefinedInput( _inputTable.getObjectOfIndex( inputName ) ) ; 00056 Input< Type > * input( 0 ) ; 00057 if( redefinedInput == 0 ) 00058 { 00059 input = _controller.template createInput< Type >( inputName, *this, 00060 makeConnectable, 00061 precisionLevel ) ; 00062 } 00063 else 00064 { 00065 input = dynamic_cast< Input< Type > * >( redefinedInput ) ; 00066 if( input == 0 ) 00067 { 00068 throw UnallowedOverloadingException( inputName, getName() ) ; 00069 } 00070 else 00071 { 00072 OMTRACEID( OMK_DEBUG_OMK_EXEC, "input \"" << inputName 00073 << "\" of " << OMK::debugMsg( this ) 00074 <<" already defined. No new input created : reference to old one used" ) ; 00075 } 00076 } 00077 return *input ; 00078 }
| SensitiveInput< Type > & OMK::SimulatedObject::addSensitiveInput | ( | const Name & | inputName, | |
| bool | makeConnectable = false, |
|||
| int | precisionLevel = OMK::Type::PolatorNT::defaultPrecisionLevel | |||
| ) |
add a sensitive input to the simulated object
| inputName | name of the added input | |
| makeConnectable | allow other simulated objects to change the connection of the created input | |
| precisionLevel | quality of the polations associated with the created input |
Definition at line 81 of file OMKSimulatedObject.inl.
References _controller, _inputTable, OMK::debugMsg(), getName(), OMK_DEBUG_OMK_EXEC, and OMTRACEID.
00084 { 00085 InputNT *redefinedInput( _inputTable.getObjectOfIndex( inputName ) ) ; 00086 SensitiveInput< Type > *input( 0 ) ; 00087 if( redefinedInput == 0 ) 00088 { 00089 input = _controller.template createSensitiveInput< Type >( inputName, 00090 *this, 00091 makeConnectable, 00092 precisionLevel ); 00093 } 00094 else 00095 { 00096 input = dynamic_cast< SensitiveInput< Type > * >( redefinedInput ) ; 00097 if( input == 0 ) 00098 { 00099 throw UnallowedOverloadingException( inputName, getName() ) ; 00100 } 00101 else 00102 { 00103 OMTRACEID( OMK_DEBUG_OMK_EXEC, "sensitiveInput \"" << inputName 00104 << "\" of " << OMK::debugMsg( this ) 00105 <<" already defined. No new sensitiveInput created : reference to old one used" ) ; 00106 } 00107 } 00108 return *input ; 00109 }
| SensitiveNotifyingInput< Type > & OMK::SimulatedObject::addSensitiveNotifyingInput | ( | const Name & | inputName, | |
| bool | makeConnectable = false, |
|||
| int | precisionLevel = OMK::Type::PolatorNT::defaultPrecisionLevel | |||
| ) |
add a sensitive Notifying input to the simulated object
| inputName | name of the added input | |
| makeConnectable | allow other simulated objects to change the connection of the created input | |
| precisionLevel | quality of the polations associated with the created input |
Definition at line 112 of file OMKSimulatedObject.inl.
References _controller, _inputTable, OMK::debugMsg(), getName(), OMK_DEBUG_OMK_EXEC, and OMTRACEID.
00116 { 00117 InputNT *redefinedInput( _inputTable.getObjectOfIndex( inputName ) ) ; 00118 SensitiveNotifyingInput< Type > *input( 0 ) ; 00119 if( redefinedInput == 0 ) 00120 { 00121 input = _controller.template createSensitiveNotifyingInput< Type >( 00122 inputName, *this, makeConnectable, precisionLevel ) ; 00123 } 00124 else 00125 { 00126 input = dynamic_cast< SensitiveNotifyingInput< Type > * >( redefinedInput ) ; 00127 if( input == 0 ) 00128 { 00129 throw UnallowedOverloadingException( inputName, getName() ) ; 00130 } 00131 else 00132 { 00133 OMTRACEID( OMK_DEBUG_OMK_EXEC, "sensitiveNotifyingInput \"" << inputName 00134 << "\" of " << OMK::debugMsg( this ) 00135 << " already defined. No new sensitiveNotifyingInput created : reference to old one used" ) ; 00136 } 00137 } 00138 return *input ; 00139 }
| void SimulatedObject::deleteInput | ( | const Name & | inputName | ) |
delete an input from the list of inputs of the simulated object WARNING : consideration is being given for the removal of this member function
| inputName | the name of the input to be deleted |
Definition at line 127 of file OMKSimulatedObject.cpp.
References _inputTable.
Referenced by OMK::Iii::SharedConnectorT< Type >::connect(), OMK::Iii::SharedConnectorT< Type >::disconnect(), OMK::Iii::SimpleConnectorT< Type >::disconnect(), and OMK::IAttributeT< PrmType, ModelType, AccessorType >::~IAttributeT().
00128 { 00129 InputNT * obj = _inputTable[ name ] ; 00130 _inputTable.erase( name ) ; 00131 delete obj ; 00132 }
| Output< Type > & OMK::SimulatedObject::addOutput | ( | const Name & | outputName, | |
| OMK::Type::PolatorNT * | polator = 0 | |||
| ) |
add an output to the simulated object
| outputName | name of the output to add | |
| polator | optional argument use to override the default polateur for Type |
Definition at line 142 of file OMKSimulatedObject.inl.
References _controller, _outputTable, OMK::debugMsg(), getName(), OMK_DEBUG_OMK_EXEC, and OMTRACEID.
00144 { 00145 OutputNT *redefinedOutput( _outputTable.getObjectOfIndex( outputName ) ) ; 00146 Output< Type > *output( 0 ); 00147 if( redefinedOutput == 0 ) 00148 { 00149 output = _controller.template createOutput< Type >( outputName, *this, 00150 polator ) ; 00151 } 00152 else 00153 { 00154 output = dynamic_cast< Output< Type > * >( redefinedOutput ) ; 00155 if( output == 0 ) 00156 { 00157 throw UnallowedOverloadingException( outputName, getName() ) ; 00158 } 00159 else 00160 { 00161 OMTRACEID( OMK_DEBUG_OMK_EXEC, "output \"" << outputName << "\" of " 00162 << OMK::debugMsg( this ) 00163 << " already defined. No new output created : reference to old one used" ) ; 00164 } 00165 } 00166 _outputTable.addObjectWithIndex( outputName, output ) ; 00167 return *output ; 00168 }
| ControlParameter< Type > & OMK::SimulatedObject::addControlParameter | ( | const Name & | controlParameterName, | |
| OMK::Type::PolatorNT * | polator = 0 | |||
| ) |
add a control parameter to the simulated object
| controlParamaterName | name of the control parameter to add | |
| polator | optional argument use to override the default polateur for Type |
Definition at line 171 of file OMKSimulatedObject.inl.
References _controller, _controlParameterTable, OMK::debugMsg(), getName(), OMASSERT, OMK_DEBUG_OMK_EXEC, and OMTRACEID.
00174 { 00175 OutputNT *redefinedControlParameter( _controlParameterTable.getObjectOfIndex( 00176 controlParameterName ) ) ; 00177 ControlParameter< Type > *controlParameter( 0 ) ; 00178 if( redefinedControlParameter == 0 ) 00179 { 00180 controlParameter = _controller.template createControlParameter< Type >( 00181 controlParameterName, *this, polator ) ; 00182 } 00183 else 00184 { 00185 controlParameter = dynamic_cast < ControlParameter<Type> * >( 00186 redefinedControlParameter ) ; 00187 if( controlParameter == 0 ) 00188 { 00189 throw UnallowedOverloadingException( controlParameterName, getName() ) ; 00190 } 00191 else 00192 { 00193 OMTRACEID( OMK_DEBUG_OMK_EXEC, "controlParameter \"" << 00194 controlParameterName << "\" of " << OMK::debugMsg( this ) 00195 <<" already defined. No new controlParameter created : reference to old one used" ) ; 00196 } 00197 } 00198 OutputNT *realControlParameter( dynamic_cast< OutputNT * >( controlParameter ) ) ; 00199 OMASSERT( realControlParameter != 0 ) ; 00200 _controlParameterTable.addObjectWithIndex( controlParameterName, 00201 realControlParameter ) ; 00202 return *controlParameter ; 00203 }
| InputAlias< Type > & OMK::SimulatedObject::addInputAlias | ( | const Name & | aliasName, | |
| const Name & | aliasedObjectName, | |||
| const Name & | aliasedInputName, | |||
| int | precisionLevel = OMK::Type::PolatorNT::defaultPrecisionLevel | |||
| ) |
add an input which is an alias to an input of an other object
| aliasName | name of the added input | |
| aliasedObjectName | the of the object being aliased. aliasedObjectName should be a simulated object ancestor of the current object | |
| aliasedInputName | name of the input aliased | |
| makeConnectable | allow other simulated objects to change the connection of the created input | |
| precisionLevel | quality of the polations associated with the created input |
Definition at line 206 of file OMKSimulatedObject.inl.
References _controller, _inputTable, OMK::debugMsg(), OMK::Controller::error(), getName(), OMK::Controller::getPointerToSimulatedObjectNamed(), isAncestor(), OMERROR, OMK_DEBUG_OMK_EXEC, and OMTRACEID.
00210 { 00211 InputNT *redefinedInput( _inputTable.getObjectOfIndex( aliasName ) ) ; 00212 InputAlias< Type > *alias( 0 ) ; 00213 if( redefinedInput == 0 ) 00214 { 00215 // make sure aliasedObjectName is an ancestor of object 00216 if( isAncestor( aliasedObjectName ) ) 00217 { 00218 SimulatedObject *obj( _controller.getPointerToSimulatedObjectNamed( 00219 aliasedObjectName ) ) ; 00220 InputNT *input( obj->_inputTable.getObjectOfIndex( aliasedInputName ) ) ; 00221 AbstractInput< Type > *realInput( dynamic_cast< AbstractInput< Type > * >( 00222 input ) ) ; 00223 if( realInput != 0 ) 00224 { 00225 if( obj != 0 ) 00226 { 00227 alias = _controller.template createInputAlias< Type >( aliasName, 00228 *this, 00229 realInput, 00230 precisionLevel ) ; 00231 } 00232 else 00233 { 00234 Controller::error( "imposible aliasing " ) ; 00235 } 00236 } 00237 else 00238 { 00239 Controller::error( "impossible aliasing, probably because of type mismatch" ) ; 00240 } 00241 } 00242 else 00243 { 00244 OMERROR( "SimulatedObject::createInputAlias \"" << aliasedObjectName 00245 << "\" isn't the father of " 00246 << OMK::debugMsg( this ) 00247 << " : aliasing is therefore impossible for alias named \"" 00248 << aliasedInputName << "\"" ) ; 00249 Controller::error( "" ) ; 00250 } 00251 } 00252 else 00253 { 00254 alias = dynamic_cast< InputAlias< Type > * >( redefinedInput ) ; 00255 if( alias == 0 ) 00256 { 00257 throw UnallowedOverloadingException( aliasName, getName() ) ; 00258 } 00259 else 00260 { 00261 OMTRACEID( OMK_DEBUG_OMK_EXEC, "inputAlias \"" << aliasName 00262 << "\" of " << OMK::debugMsg( this ) 00263 <<" already defined. No new inputAlias created : reference to old one used" ) ; 00264 } 00265 } 00266 return *alias ; 00267 }
| SensitiveInputAlias< Type > & OMK::SimulatedObject::addSensitiveInputAlias | ( | const Name & | aliasName, | |
| const Name & | aliasedObjectName, | |||
| const Name & | aliasedInputName, | |||
| int | precisionLevel = OMK::Type::PolatorNT::defaultPrecisionLevel | |||
| ) |
add an sensitive input which is an alias to an input of an other object
| aliasName | name of the added input | |
| aliasedObjectName | the of the object being aliased. aliasedObjectName should be a simulated object ancestor of the current object | |
| aliasedInputName | name of the input aliased | |
| makeConnectable | allow other simulated objects to change the connection of the created input | |
| precisionLevel | quality of the polations associated with the created input |
Definition at line 270 of file OMKSimulatedObject.inl.
References _controller, _inputTable, OMK::debugMsg(), OMK::Controller::error(), getName(), OMK::Controller::getPointerToSimulatedObjectNamed(), isAncestor(), OMERROR, OMK_DEBUG_OMK_EXEC, and OMTRACEID.
00275 { 00276 InputNT *redefinedInput( _inputTable.getObjectOfIndex( aliasName ) ) ; 00277 SensitiveInputAlias< Type > *alias( 0 ) ; 00278 if( redefinedInput == 0 ) 00279 { 00280 // make sure aliasedObjectName is an ancestor of object 00281 if( isAncestor( aliasedObjectName ) ) 00282 { 00283 SimulatedObject *obj( _controller.getPointerToSimulatedObjectNamed( 00284 aliasedObjectName ) ) ; 00285 InputNT * input( obj->_inputTable.getObjectOfIndex( aliasedInputName ) ) ; 00286 AbstractInput< Type > *realInput( dynamic_cast< AbstractInput< Type > * >( 00287 input ) ) ; 00288 if( realInput != 0 ) 00289 { 00290 if( obj != 0 ) 00291 { 00292 alias = _controller.template createSensitiveInputAlias< Type >( 00293 aliasName, *this, realInput, precisionLevel ) ; 00294 } 00295 else 00296 { 00297 Controller::error( "Impossible aliasing " ) ; 00298 } 00299 } 00300 else 00301 { 00302 Controller::error( "impossible aliasing, probably because of type mismatch" ) ; 00303 } 00304 } 00305 else 00306 { 00307 OMERROR( "SimulatedObject::addSensitiveInputAlias \n" << aliasedObjectName 00308 << "\n isn't the father of " << OMK::debugMsg( this ) 00309 << " : cannot create an alias of \"" 00310 << aliasedInputName << "\"" ) ; 00311 throw UserException( "" ) ; 00312 } 00313 } 00314 else 00315 { 00316 alias = dynamic_cast< SensitiveInputAlias< Type > * >( redefinedInput ) ; 00317 if( alias == 0 ) 00318 { 00319 throw UnallowedOverloadingException( aliasName, getName() ) ; 00320 } 00321 else 00322 { 00323 OMTRACEID( OMK_DEBUG_OMK_EXEC, "sensitiveInputAlias \"" << aliasName 00324 << "\" of " << OMK::debugMsg( this ) 00325 <<" already defined. No new sensitiveInputAlias created : reference to old one used" ) ; 00326 } 00327 } 00328 return *alias ; 00329 }
| SensitiveNotifyingInputAlias< Type > & OMK::SimulatedObject::addSensitiveNotifyingInputAlias | ( | const Name & | aliasName, | |
| const Name & | aliasedObjectName, | |||
| const Name & | aliasedInputName, | |||
| int | precisionLevel = OMK::Type::PolatorNT::defaultPrecisionLevel | |||
| ) |
add a sensitive Notifying input which is an alias to an input of an other object
| aliasName | name of the added input | |
| aliasedObjectName | the of the object being aliased. aliasedObjectName should be a simulated object ancestor of the current object | |
| aliasedInputName | name of the input aliased | |
| makeConnectable | allow other simulated objects to change the connection of the created input | |
| precisionLevel | quality of the polations associated with the created input |
Definition at line 333 of file OMKSimulatedObject.inl.
References _controller, _inputTable, OMK::debugMsg(), OMK::Controller::error(), getName(), OMK::Controller::getPointerToSimulatedObjectNamed(), isAncestor(), OMERROR, OMK_DEBUG_OMK_EXEC, and OMTRACEID.
00337 { 00338 InputNT *redefinedInput( _inputTable.getObjectOfIndex( aliasName ) ) ; 00339 SensitiveNotifyingInputAlias< Type > *alias( 0 ) ; 00340 if( redefinedInput == 0 ) 00341 { 00342 // make sure aliasedObjectName is an ancestor of object 00343 if( isAncestor( aliasedObjectName ) ) 00344 { 00345 SimulatedObject *obj( _controller.getPointerToSimulatedObjectNamed( 00346 aliasedObjectName ) ) ; 00347 InputNT *input( obj->_inputTable.getObjectOfIndex( aliasedInputName ) ) ; 00348 AbstractInput< Type > *realInput( dynamic_cast < AbstractInput< Type > * >( 00349 input ) ) ; 00350 if( realInput != 0 ) 00351 { 00352 if( obj != 0 ) 00353 { 00354 alias = 00355 _controller.template createSensitiveNotifyingInputAlias< Type >( 00356 aliasName, *this, realInput, precisionLevel ) ; 00357 } 00358 else 00359 { 00360 throw UserException( "Impossible aliasing " ) ; 00361 } 00362 } 00363 else 00364 { 00365 Controller::error( "alias type mismatch" ) ; 00366 } 00367 } 00368 else 00369 { 00370 OMERROR( "SimulatedObject::addSensitiveSeignalingInputAlias \"" 00371 << aliasedObjectName << "\" isn' the father of " 00372 << OMK::debugMsg( this ) 00373 << " : creation of alias named \"" << aliasedInputName 00374 << "\" impossible" ) ; 00375 throw UserException( "" ); 00376 } 00377 } 00378 else 00379 { 00380 alias = dynamic_cast< SensitiveNotifyingInputAlias< Type > * >( 00381 redefinedInput ) ; 00382 if( alias == 0 ) 00383 { 00384 throw UnallowedOverloadingException( aliasName, getName() ) ; 00385 } 00386 else 00387 { 00388 OMTRACEID( OMK_DEBUG_OMK_EXEC, "sensitiveNotifyingInputAlias \"" 00389 << aliasName << " of " << OMK::debugMsg( this ) 00390 <<" already defined. No new sensitiveNotifyingInputAlias : reference to old one used" ) ; 00391 } 00392 } 00393 return *alias ; 00394 }
| OutputAlias< Type > & OMK::SimulatedObject::addOutputAlias | ( | const Name & | aliasName, | |
| const Name & | aliasedObjectName, | |||
| const Name & | aliasedOutputName, | |||
| OMK::Type::PolatorNT * | interp = 0 | |||
| ) |
add an output which is an alias to the output of an ancestor in the simulation tree
| aliasName | name of the added input | |
| aliasedObjectName | the of the object being aliased. aliasedObjectName should be a simulated object ancestor of the current object | |
| aliasedOutputName | name of the input aliased |
Definition at line 397 of file OMKSimulatedObject.inl.
References _controller, _outputTable, OMK::debugMsg(), OMK::Controller::error(), getController(), getName(), OMK::Controller::getPointerToSimulatedObjectNamed(), OMERROR, OMK_DEBUG_OMK_EXEC, and OMTRACEID.
00402 { 00403 OutputNT *redefinedOutput( _outputTable.getObjectOfIndex( aliasName ) ) ; 00404 OutputAlias< Type > *alias( 0 ) ; 00405 std::list< const ObjectDescriptor * > *listeFils( 00406 getController().template listDescendantsOfType< SimulatedObject >( 00407 aliasedObjectName ) ) ; 00408 bool aliasedObjectPresent( false ) ; 00409 00410 if( redefinedOutput == 0 ) 00411 { 00412 // make sure aliasedObjectName is an ancestor of object 00413 if( listeFils != 0 ) 00414 { 00415 std::list< const ObjectDescriptor * >::const_iterator listeFilsIterator( 00416 listeFils->begin() ) ; 00417 while( listeFilsIterator != listeFils->end() && !aliasedObjectPresent ) 00418 { 00419 aliasedObjectPresent = ( (*listeFilsIterator)->getName() == getName() ) ; 00420 ++listeFilsIterator ; 00421 } 00422 delete listeFils ; 00423 } 00424 if( aliasedObjectPresent ) 00425 { 00426 SimulatedObject *obj( _controller.getPointerToSimulatedObjectNamed( 00427 aliasedObjectName ) ) ; 00428 OutputNT *Outputnt( obj->getPointerToOutputNamed( aliasedOutputName ) ) ; 00429 Output< Type > *refOutput( dynamic_cast< Output< Type > * >( Outputnt ) ) ; 00430 if( refOutput != 0 ) 00431 { 00432 if( obj != 0 ) 00433 { 00434 alias = _controller.template createOutputAlias< Type >( 00435 aliasName, *this, refOutput, interp ) ; 00436 } 00437 else 00438 { 00439 OMERROR( "SimulatedObject::addOutputAlias " << std::endl 00440 << "alias \"" << aliasName 00441 << "\" cannot be made on inexistant \"" 00442 << aliasedOutputName << "\"" ) ; 00443 throw UserException( "" ) ; 00444 } 00445 } 00446 else 00447 { 00448 throw UserException( "Impossible output aliasing : type mismatch" ) ; 00449 } 00450 } 00451 else 00452 { 00453 OMERROR( "SimulatedObject::addOutputAlias \"" << aliasedObjectName 00454 << "\" isn't the father of " << OMK::debugMsg( this ) 00455 << " : not possible to alias \"" 00456 << aliasedOutputName << "\"" ) ; 00457 Controller::error( "" ) ; 00458 } 00459 } 00460 else 00461 { 00462 alias = dynamic_cast< OutputAlias< Type > * >( redefinedOutput ) ; 00463 if( alias == 0 ) 00464 { 00465 throw UnallowedOverloadingException( aliasName, getName() ) ; 00466 } 00467 else 00468 { 00469 OMTRACEID( OMK_DEBUG_OMK_EXEC, 00470 "outputAlias already defined. No new outputAlias created : reference to old one used" ) ; 00471 } 00472 } 00473 _outputTable.addObjectWithIndex( aliasName, alias ) ; 00474 return *alias ; 00475 }
| const Date & SimulatedObject::getSimulatedDate | ( | ) | const [virtual] |
get the simulated date
Reimplemented in OMK::Controller.
Definition at line 798 of file OMKSimulatedObject.cpp.
References _controller, and OMK::Controller::getSimulatedDate().
Referenced by fireSignal(), fireValuedSignal(), insertInStream(), pack(), and OMK::PvmReferenceObjectHandle::unpack().
00798 { 00799 return _controller.getSimulatedDate(); 00800 }
| float SimulatedObject::getPeriod | ( | ) | const |
getPeriod this is a shorthand for 1 / _objectDescriptor.Frequency () is expressed in seconds
Definition at line 208 of file OMKSimulatedObject.cpp.
References _objectDescriptor, and OMK::ObjectDescriptor::getFrequency().
Referenced by OMK::PvmMirrorObjectHandle::sendRequestToReferenceObject().
00209 { 00210 return 1.f / _objectDescriptor.getFrequency () ; 00211 }
| void SimulatedObject::sendEvent | ( | const Name & | receiver, | |
| const EventIdentifier & | eventId | |||
| ) |
send an event
| receiver | name of the receiver the simulated object the event is sent to eventId signature of the sent event |
Definition at line 327 of file OMKSimulatedObject.cpp.
References _controller, OMK::Controller::addToPendingEvents(), getController(), getName(), OMK::Controller::getPointerToSimulatedObjectNamed(), OMK::Controller::getSimulatedDate(), OMK_DEBUG_OMK_EVENT, and OMTRACEID.
Referenced by OMK::Controller::createLocalObject(), OMK::Controller::createObject(), OMK::Controller::destroyObject(), OMK::Inp::EscListener::keyPressed(), OMK::Controller::migrateObjectToProcess(), OMK::DistributedController::processEvent(), OMK::DistributedController::processNewObjectDeclaration(), OMK::DistributedController::receiveCancellationForSignal(), OMK::DistributedController::receiveRegistrationForSignal(), OMK::Iii::SessionPrm::selfControlRelease(), sendEvent(), OMK::Inp::InputListener::sendEvent(), OMK::Controller::sendInitialEventsTo(), and OMK::EventSignalEmitterUtil::sendUtil().
00328 { 00329 OMTRACEID( OMK_DEBUG_OMK_EVENT, "SimulatedObject::sendEvent( const Name & \"" << receiver 00330 <<"\", const EventIdentifier & \"" << eventId << "\" ) at " << _controller.getSimulatedDate() ) ; 00331 SimulatedObject *objDest = _controller.getPointerToSimulatedObjectNamed( receiver ) ; 00332 if ( objDest == NULL ) 00333 { 00334 getController().addToPendingEvents( new Event( eventId, 00335 _controller.getSimulatedDate (), 00336 getName (), 00337 receiver ) ) ; 00338 } 00339 else 00340 { 00341 sendEvent( objDest, eventId ) ; 00342 } 00343 }
| void SimulatedObject::sendEvent | ( | SimulatedObject * | receiver, | |
| const EventIdentifier & | eventId | |||
| ) |
send an event
| receiver | pointer to the receiver the simulated object the event is sent to eventId signature of the sent event |
Definition at line 306 of file OMKSimulatedObject.cpp.
References _controller, OMK::Controller::addToPendingEvents(), getController(), getName(), getObjectHandle(), OMK::Controller::getSimulatedDate(), OMASSERT, OMK_DEBUG_OMK_EVENT, OMTRACEID, and OMK::ObjectHandle::receiveEvent().
00307 { 00308 OMTRACEID( OMK_DEBUG_OMK_EVENT, "SimulatedObject::sendEvent ( SimulatedObject * \"" << receiver 00309 << "\", const EventIdentifier & \"" << eventId << "\" )" ) ; 00310 OMASSERT( receiver != NULL ) ; 00311 if( receiver->getObjectHandle() != NULL ) 00312 { 00313 receiver->getObjectHandle()->receiveEvent( new Event( eventId, 00314 _controller.getSimulatedDate (), 00315 getName (), 00316 receiver->getName () ) ) ; 00317 } 00318 else 00319 { //could happen during creation when the object handle is not yet created. 00320 getController().addToPendingEvents( new Event( eventId, 00321 _controller.getSimulatedDate (), 00322 getName (), 00323 receiver->getName () ) ) ; 00324 } 00325 }
| void SimulatedObject::sendEvent | ( | SimulatedObject & | receiver, | |
| const EventIdentifier & | eventId | |||
| ) |
send an event
| receiver | pointer to the receiver the simulated object the event is sent to eventId signature of the sent event |
Definition at line 299 of file OMKSimulatedObject.cpp.
References getName(), OMK_DEBUG_OMK_EVENT, OMTRACEID, and sendEvent().
00300 { 00301 OMTRACEID( OMK_DEBUG_OMK_EVENT, "SimulatedObject::sendEvent ( SimulatedObject & \"" << receiver.getName() 00302 << "\", const EventIdentifier & \"" << eventId << "\" )" ) ; 00303 sendEvent( &receiver, eventId ) ; 00304 }
| void OMK::SimulatedObject::sendValuedEvent | ( | const Name & | receiver, | |
| const EventIdentifier & | eventId, | |||
| const UserType & | userInfo | |||
| ) |
send a valued event
| receiver | name of the receiver the simulated object the event is sent to | |
| userInfo | the value associated to the sent event eventId signature of the sent event |
Definition at line 478 of file OMKSimulatedObject.inl.
References _controller, OMK::Controller::addToPendingEvents(), getController(), getName(), OMK::Controller::getPointerToSimulatedObjectNamed(), and OMK::Controller::getSimulatedDate().
Referenced by OMK::Vis::VisObjectExtension::loadAnimatorParameters(), OMK::Vis::VisBase::processAddVisualObjectEvent(), OMK::Input< T >::realConnect(), OMK::Iii::SessionPrm::selfControlRelease(), OMK::Iii::SessionPrm::selfControlTakeOverAndGetCurrentValues(), OMK::Iii::SessionPrm::selfGetAccessibleParameters(), OMK::Iii::IConnector::SendControlEnded(), OMK::Iii::IConnector::SendControlReleased(), OMK::Iii::IConnector::SendControlReleasedBy(), OMK::Iii::IConnector::SendControlTakenBy(), OMK::IAttributeT< PrmType, ModelType, AccessorType >::sendIdAndValue(), OMK::MultiValuedEventSignalEmitterUtilT< T, ModelType >::sendUtil(), OMK::ValuedEventSignalEmitterUtilT< T, ModelType >::sendUtil(), OMK::IAttributeT< PrmType, ModelType, AccessorType >::sendValue(), sendValuedEvent(), OMK::Inp::InputListener::sendValuedEvent(), and OMK::GenericControlParameter< T, AncestorClass >::set().
00481 { 00482 SimulatedObject *receiverObject( 00483 _controller.getPointerToSimulatedObjectNamed( receiver ) ) ; 00484 if( receiverObject == 0 ) 00485 { 00486 getController().addToPendingEvents( 00487 new ValuedEvent< UserType >( eventId, 00488 _controller.getSimulatedDate(), 00489 getName(), 00490 receiver, 00491 userInfo ) ) ; 00492 } 00493 else 00494 { 00495 sendValuedEvent( receiverObject, eventId, userInfo ) ; 00496 } 00497 }
| void OMK::SimulatedObject::sendValuedEvent | ( | SimulatedObject * | receiver, | |
| const EventIdentifier & | eventId, | |||
| const UserType & | userInfo | |||
| ) |
send a valued event
| receiver | pointer to the receiver the simulated object the event is sent to | |
| userInfo | the value associated to the sent event eventId signature of the sent event |
Definition at line 500 of file OMKSimulatedObject.inl.
References _controller, OMK::Controller::addToPendingEvents(), getController(), getName(), getObjectHandle(), OMK::Controller::getSimulatedDate(), and OMK::ObjectHandle::receiveEvent().
00503 { 00504 if( receiver->getObjectHandle() == 0 ) 00505 { 00506 getController().addToPendingEvents( 00507 new ValuedEvent< UserType >( eventId, 00508 _controller.getSimulatedDate(), 00509 getName(), 00510 receiver->getName(), 00511 userInfo ) ) ; 00512 } 00513 else 00514 { 00515 receiver->getObjectHandle()->receiveEvent( 00516 new ValuedEvent< UserType >( eventId, 00517 _controller.getSimulatedDate(), 00518 getName(), 00519 receiver->getName(), 00520 userInfo ) ) ; 00521 } 00522 }
| void OMK::SimulatedObject::sendValuedEvent | ( | SimulatedObject & | receiver, | |
| const EventIdentifier & | eventId, | |||
| const UserType & | userInfo | |||
| ) |
send a valued event
| receiver | pointer to the receiver the simulated object the event is sent to | |
| userInfo | the value associated to the sent event eventId signature of the sent event |
Definition at line 525 of file OMKSimulatedObject.inl.
References sendValuedEvent().
00528 { 00529 sendValuedEvent( &receiver, eventId, userInfo ) ; 00530 }
| void SimulatedObject::sendEvent | ( | const Event & | event | ) |
send an event.
the event received is a copy of event
| event | the event to be sent |
Definition at line 261 of file OMKSimulatedObject.cpp.
References _controller, OMK::Controller::addToPendingEvents(), OMK::Event::clone(), OMK::Event::date, OMK::Event::eventId, getController(), getObjectHandle(), OMK::Controller::getPointerToSimulatedObjectNamed(), OMK_DEBUG_OMK_EVENT, OMTRACEID, OMK::ObjectHandle::receiveEvent(), and OMK::Event::receiver.
00262 { 00263 OMTRACEID( OMK_DEBUG_OMK_EVENT, "SimulatedObject::sendEvent( const Event & \"" 00264 << event.eventId << "\" ) to \"" << event.receiver << "\" at " << event.date ) ; 00265 SimulatedObject *objDest = _controller.getPointerToSimulatedObjectNamed( event.receiver ) ; 00266 if( objDest == NULL ) 00267 { 00268 getController().addToPendingEvents( event.clone() ) ; 00269 } 00270 else if( objDest->getObjectHandle() == NULL ) 00271 { 00272 getController().addToPendingEvents( event.clone() ) ; 00273 } 00274 else 00275 { 00276 objDest->getObjectHandle()->receiveEvent( event ) ; 00277 } 00278 }
| void SimulatedObject::sendEvent | ( | Event * | event | ) |
send the event pointed to by event warning : after this member function is called, *event should be considered as deleted, as the controler will delete it at any time : use previous member function if you want Mask to copy the event.
| event | a pointer to the event to be sent |
Definition at line 280 of file OMKSimulatedObject.cpp.
References _controller, OMK::Controller::addToPendingEvents(), OMK::Event::date, OMK::Event::eventId, getController(), getObjectHandle(), OMK::Controller::getPointerToSimulatedObjectNamed(), OMK_DEBUG_OMK_EVENT, OMTRACEID, OMK::ObjectHandle::receiveEvent(), and OMK::Event::receiver.
00281 { 00282 OMTRACEID( OMK_DEBUG_OMK_EVENT, "SimulatedObject::sendEvent ( Event * \"" << event->eventId 00283 << "\" ) to \"" << event->receiver << "\" at " << event->date ) ; 00284 SimulatedObject *objDest = _controller.getPointerToSimulatedObjectNamed( event->receiver ) ; 00285 if( objDest == NULL ) 00286 { 00287 getController().addToPendingEvents( event ) ; 00288 } 00289 else if( objDest->getObjectHandle() == NULL ) 00290 { 00291 getController().addToPendingEvents( event ) ; 00292 } 00293 else 00294 { 00295 objDest->getObjectHandle()->receiveEvent( event ) ; 00296 } 00297 }
friend class InputNT [friend] |
Controller& OMK::SimulatedObject::_controller [protected] |
reéférence sur le controleur
Definition at line 639 of file OMKSimulatedObject.h.
Referenced by addControlParameter(), addInput(), addInputAlias(), addOutput(), addOutputAlias(), addSensitiveInput(), addSensitiveInputAlias(), addSensitiveNotifyingInput(), addSensitiveNotifyingInputAlias(), cancelRegistrationForSignal(), cancelRegistrationForSignalBy(), getController(), getFather(), getSimulatedDate(), OMK::Vis::VisBase::registerEventPlug(), registerForSignal(), registerForSignalBy(), sendEvent(), and sendValuedEvent().
const ObjectDescriptor& OMK::SimulatedObject::_objectDescriptor [protected] |
référence sur le descripteur d'objet
Definition at line 642 of file OMKSimulatedObject.h.
Referenced by getConfigurationParameters(), getFather(), getFathersDescriptor(), getName(), getObjectDescriptor(), getPeriod(), SimulatedObject(), and ~SimulatedObject().
NameToPointerMap<InputNT> OMK::SimulatedObject::_inputTable [protected] |
the input table
Definition at line 646 of file OMKSimulatedObject.h.
Referenced by addInput(), addInputAlias(), addSensitiveInput(), addSensitiveInputAlias(), addSensitiveNotifyingInput(), addSensitiveNotifyingInputAlias(), deleteInput(), getInputTable(), getPointerToInputNamed(), OMK::InputNT::registerMe(), and ~SimulatedObject().
NameToPointerMap<OutputNT> OMK::SimulatedObject::_outputTable [protected] |
the output table
Definition at line 649 of file OMKSimulatedObject.h.
Referenced by addOutput(), addOutputAlias(), extract(), getOutputTable(), getPointerToOutputNamed(), insertInStream(), pack(), packAllValues(), unpack(), unpackAllValues(), and ~SimulatedObject().
the table of control parameters
Definition at line 652 of file OMKSimulatedObject.h.
Referenced by addControlParameter(), extract(), getControlParameterTable(), getPointerToControlParameterNamed(), insertInStream(), pack(), packAllValues(), unpack(), unpackAllValues(), and ~SimulatedObject().
std::list<EventListener *> OMK::SimulatedObject::_listOfEventListeners [protected] |
the list of Event listeners of that object
Definition at line 655 of file OMKSimulatedObject.h.
Referenced by addEventListener(), getEventListeners(), unregisterEventListener(), and ~SimulatedObject().
ObjectHandle* OMK::SimulatedObject::_objectHandle [protected] |
pointeur on the associated objectHandle
Definition at line 658 of file OMKSimulatedObject.h.
Referenced by OMK::Controller::Controller(), getObjectHandle(), OMK::Controller::hasEventsToProcess(), OMK::PvmController::PvmController(), OMK::PvmController::run(), OMK::Controller::run(), setObjectHandle(), and OMK::Controller::~Controller().

| Documentation generated on Mon Jun 9 11:46:03 2008 |
Generated with doxygen by Dimitri van Heesch , 1997-2007 |