#include <OMKController.h>
Inheritance diagram for OMK::Controller:
Public Types | |
| typedef std::pair< Name, Name > | MigrationObjectPrm |
| typedef std::pair< ObjectDescriptor, Name > | CreateObjectPrm |
| parameters to create object | |
Public Member Functions | |
| Controller (ObjectDescriptor &simulationTree, const Date &initialDate) | |
| constructor for a classic controller | |
| virtual | ~Controller () |
| destructor | |
| virtual void | init () |
| initialise the object. | |
| virtual void | run () |
| run Start the controller on a infinite loop which will be broken if system events are sent to the controller | |
| template<typename Type> | |
| std::list< const ObjectDescriptor * > * | listDescendantsOfType (const Name &objectName) |
| List the descendants of an object that are of a certain type. | |
| template<typename Type> | |
| std::list< const ObjectDescriptor * > * | listBrothersOfType (const Name objectName) |
| list brothers of objectName in the simulation tree of that are of type t | |
| void | processStartEventAfterMorphose (ReferenceObjectHandle *objectHandle) |
| CHADI. | |
| virtual void | createLocalObject (const ObjectDescriptor &newLObjectDescription, const Name &fathersLName) |
| create a local object | |
| virtual int | getMirrorsNbre () |
| virtual bool | isAMirror (const Name &name) |
| virtual std::vector< Name > | getMirrorList () |
| virtual std::vector< Name > | getIsolatedMirrorList () |
| virtual std::vector< Name > | getNonIsolatedMirrorList () |
| virtual bool | testIfTroubleOccured () |
| virtual void | createNewSite (const Date &) |
| DECLARE_TYPE_EVENT (MigrationObjectPrm, MigrationObject) | |
| void | migrateObjectToProcess (Name &nomObjet, Name &nomProcess) |
| virtual std::list< Name > | getDisconnectedProcessusList () |
| virtual std::map< Name, int > | getDisconnectedProcessusMap () |
| virtual Frequency | computeAdequateFrequency (const Frequency &suggestedFrequency) |
| compute an adequate Frequency for an object dynamically created Should be used to adapt the desired frequency when an simulated object is dynamically created so that the creation doesn't cause recomputation of the scheduling. | |
| virtual void | runControllersStep (ReferenceObjectHandle *objectHandle) |
| run a controllers simulation step. | |
| virtual void | compute () |
| computes a new simulation step for all controlled objects, if the controller is in the running state, otherwise jsut react to system events sent to controlled objects | |
| virtual void | finish () |
| finish the simulation. | |
| void | showDateAndStepNumber (bool show=true) |
| ask the controller to print (or not) to sdterr (cerr) the simulation date and the step number | |
| virtual const Date & | getSimulatedDate () const |
| Returns a reference to an allways accurate simulation date, in ms. | |
| virtual int | getCycleFrequency () const |
| get the simulation cycle frequency | |
| virtual int | getCyclePeriod () const |
| get the simulation cycle period, in simulated time (in ms) | |
| DECLARE_TYPE_EVENT (CreateObjectPrm, CreateObject) | |
| virtual void | createObject (const ObjectDescriptor &newObjectDescription, const Name &fathersName) |
| creation of an object unknown of in the simulation tree. | |
| virtual void | destroyObject (const Name &name, bool recursively) |
| destroy a simulated object. | |
| virtual void | changeObjectsFather (const Name &name, const Name &newFather) |
| change the father of an object in the simulation tree. | |
| virtual void | changeObjectsFather (ObjectDescriptor *object, ObjectDescriptor *newFather) |
| change the father of an object in the simulation tree. | |
| virtual SimulatedObject * | getPointerToDuplicatedObjectNamed (const Name &name) |
| get a pointer to a simulated object | |
| virtual SimulatedObject * | getPointerToSimulatedObjectNamed (const Name &name) |
| get a pointer to a simulated object After return from this method, it's possible to query any method of the simulated object that doesn't depend on the evolution of that object, as the object returned can have been created specially by the call. | |
| virtual const ObjectDescriptor & | getObjectDescriptorOfObject (const Name &objectName) |
| get the object descriptor of a given simulated object | |
| virtual std::vector< Name > | getReferentielList () |
| virtual void | actOnSystemEvent (Event *event) |
| called when a reference object receives a system event | |
| virtual void | reactToControlledObjectsSystemEvents () |
| process system events received by controlled objects | |
| virtual void | processStartEventOf (ReferenceObjectHandle *objectHandle) |
| process MaskStart systemEvent for the object with handle | |
| virtual void | processDeleteEventOf (ReferenceObjectHandle *objectHandle) |
| process MaskDelete systemEvent for object obj | |
| virtual void | hasEventsToProcess (ReferenceObjectHandle *referenceObjectHandle) |
| add the object handled by referenceObjectHandle to the list of objects having events to process and therefore that need activation (and therefore possibly activated at the current simulation step). | |
| virtual void | postponeEventProcessing (ReferenceObjectHandle *referenceObjectHandle) |
| add the object described by referenceObjectHandle to the list of object with events to process at the next simulation step. | |
| virtual void | noActivationNeededFor (ReferenceObjectHandle *referenceObjectHandle) |
| remove object designated by referenceObjectHandle from the list of object needing activation by the controler because they have events pending. | |
| virtual void | addToPendingEvents (Event *) |
| add the event to the list of pending events. | |
| virtual bool | addToPendingRegistrations (const EventIdentifier &sig, const Name &producer, const EventIdentifier &eventId, const Name ®istrant) |
| addToPendingRegistrations. | |
| virtual bool | removeFromPendingRegistrations (const EventIdentifier &sig, const Name &producer, const Name ®istrant) |
| removeFromPendingRegistrations. | |
| virtual bool | processEvent (Event *) |
| process events sent to the controller | |
| virtual void | processEventsOfSuspendedObjects () |
| call processEvent for suspended objects having received events | |
| virtual void | broadcastEventsForSignal (Event &event, const EventIdentifier &sigId) |
| broadcast events corresponding to a fired signal | |
| virtual bool | receiveRegistrationForSignal (const EventIdentifier &sigId, const Name ®istrant, const EventIdentifier &eventId) |
| register an object for a signal | |
| virtual bool | receiveCancellationForSignal (const EventIdentifier &sigId, const Name ®istrant) |
| cancel the registration of an object for a signal | |
| template<typename Type> | |
| Input< Type > * | createInput (const Name &name, SimulatedObject &owner, bool makeConnectable, int requestedPrecisionLevel) |
| create an input | |
| template<typename Type> | |
| SensitiveInput< Type > * | createSensitiveInput (const Name &name, SimulatedObject &owner, bool makeConnectable, int requestedPrecisionLevel) |
| create a sensitive input | |
| template<typename Type> | |
| SensitiveNotifyingInput< Type > * | createSensitiveNotifyingInput (const Name &name, SimulatedObject &owner, bool makeConnectable, int requestedPrecisionLevel) |
| create a sensitive notifying input | |
| template<typename Type> | |
| Output< Type > * | createOutput (const Name &name, SimulatedObject &owner, OMK::Type::PolatorNT *polator) |
| create an ouput | |
| template<typename Type> | |
| ControlParameter< Type > * | createControlParameter (const Name &name, SimulatedObject &owner, OMK::Type::PolatorNT *polator) |
| create a control parameter | |
| template<typename Type> | |
| InputAlias< Type > * | createInputAlias (const Name &name, SimulatedObject &owner, AbstractInput< Type > *input, int requestedPrecisionLevel) |
| create an input alias | |
| template<typename Type> | |
| SensitiveInputAlias< Type > * | createSensitiveInputAlias (const Name &name, SimulatedObject &owner, AbstractInput< Type > *input, int requestedPrecisionLevel) |
| create a sensitive input alias | |
| template<typename Type> | |
| SensitiveNotifyingInputAlias< Type > * | createSensitiveNotifyingInputAlias (const Name &name, SimulatedObject &owner, AbstractInput< Type > *input, int requestedPrecisionLevel) |
| create a sensitive notifying input alias | |
| template<typename Type> | |
| OutputAlias< Type > * | createOutputAlias (const Name &name, SimulatedObject &owner, Output< Type > *output, OMK::Type::PolatorNT *polator) |
| create an ouput alias | |
Static Public Member Functions | |
| static void | error (const char *mess) |
| included for ascendant compatibility : raises a OMKUserException with the message passed as parameter | |
| static int | lcm (const int a, const int b) |
| static int | gcd (const int a, const int b) |
| static bool | setKernelObjectFactory (KernelObjectAbstractFactory *aFactory) |
| set the kernelObjectfactory for the controller of this adressing space is only effective once for each adress space to be called before creation of the controller to be effective return : change effective | |
| static KernelObjectAbstractFactory * | getKernelObjectFactory () |
| get the active kernelObjectFactory | |
Public Attributes | |
| std::vector< Name > | _publicReferentielObjectsVector |
| CHADI. | |
Static Public Attributes | |
| static Date | initialSimulationDate |
| date at which simulation was initialised | |
Protected Member Functions | |
| virtual void | computeNextSimulationStep () |
| compute the next simulation step | |
| virtual void | scheduleObject (ReferenceObjectHandle *ref) |
| add a simulated object to the appropriate execution frames, without flagging it as executable | |
| MultipleConfigurationParameter * | getSchedulingParametersOfObject (ObjectDescriptor &) |
| get a modifiable version of the scheduling parameters of an object. | |
| SimulatedObject * | createDescribedObject (const ObjectDescriptor *description) |
| createDescribedObject. | |
| virtual void | setProcessOfDescriptor (ObjectDescriptor &objectDescription, const Name &newProcessName) |
| virtual void | computeScheduling (bool fromOriginal) |
| compute the scheduling data strucures. | |
| virtual void | sendInitialEventsTo (ReferenceObjectHandle &objectHandle, const Date &dateOfMaskStart) |
| Send MaskStart to any created objects, and send any pending events which where stored (none by default) because send to an object before it was created. | |
| virtual void | deleteObject (ObjectDescriptor *objectDescription) |
| delete an object. | |
| virtual ObjectHandle * | removeObjectFromDataStructures (const Name &) |
| remove any reference to a simulated object from all the controller's data structures | |
| virtual void | processNewObjectDeclaration (ObjectDescriptor &declaration, const Date &declarationDate) |
| processNewObjectDeclaration Once an object has been added to the simulation tree, this is called for creation and scheduling | |
| virtual ReferenceObjectHandle * | createReferenceObject (const ObjectDescriptor *idObjet) |
| createReferenceObject. | |
| virtual Scheduler * | createScheduler () |
| create the scheduler that is in charge of effective scheduling of the controlled objects | |
| virtual void | scheduleControlledObjects () |
| scheduleControlledObjects schedule all controlled reference objects | |
| virtual void | advanceSimulatedDate () |
| increment date and numberOfSimulatedSteps | |
| virtual void | createControlledObjects (const ObjectDescriptor *subTree) |
| createControlledObjects Create a reference object for all objects of a simulation tree | |
| virtual void | setCycleFrequency (int newFrequency) |
| virtual void | setComputingState (ReferenceObjectHandle *, ReferenceObjectHandle::SimulatedObjectComputingState) const |
| change the computing state of a reference object handle | |
| virtual void | switchSystemEventList () |
| switch buffer of List Of Objects Needing Activation | |
| virtual void | purgeMemoryFromOldEvents (const Date &dateOfOldestKept) |
| the method used to purge the data structures from all outdated kepts events. | |
| virtual Date | getPurgeDate () |
| get the date of the oldest event not purged by purgeMemoryFromOldEvents | |
| virtual int | getOutputHistorySize (void) |
| get the minimum history length pertinant for this controller The value returned is the value of the environement variable MaskHISTORYLENGTH, or a default value calculated so that get(-4 dt) return an exact value if it has been produced | |
| virtual ReferenceObjectHandle * | createReferenceObjectHandle (SimulatedObject &obj) |
| create a reference object handler appropriate for this controller | |
| virtual ReferenceObjectHandle * | newOMKReferenceObjectHandle (SimulatedObject &object, Controller &controller, SignalDispatcher *signalDispatcher) |
| The controller is an abstract factory for reference object handles. | |
| virtual void | deleteObjectHandle (ObjectHandle *objectHandle) |
| as the controller is an abstract factory for object handlers, is should also be an abstract destroyer | |
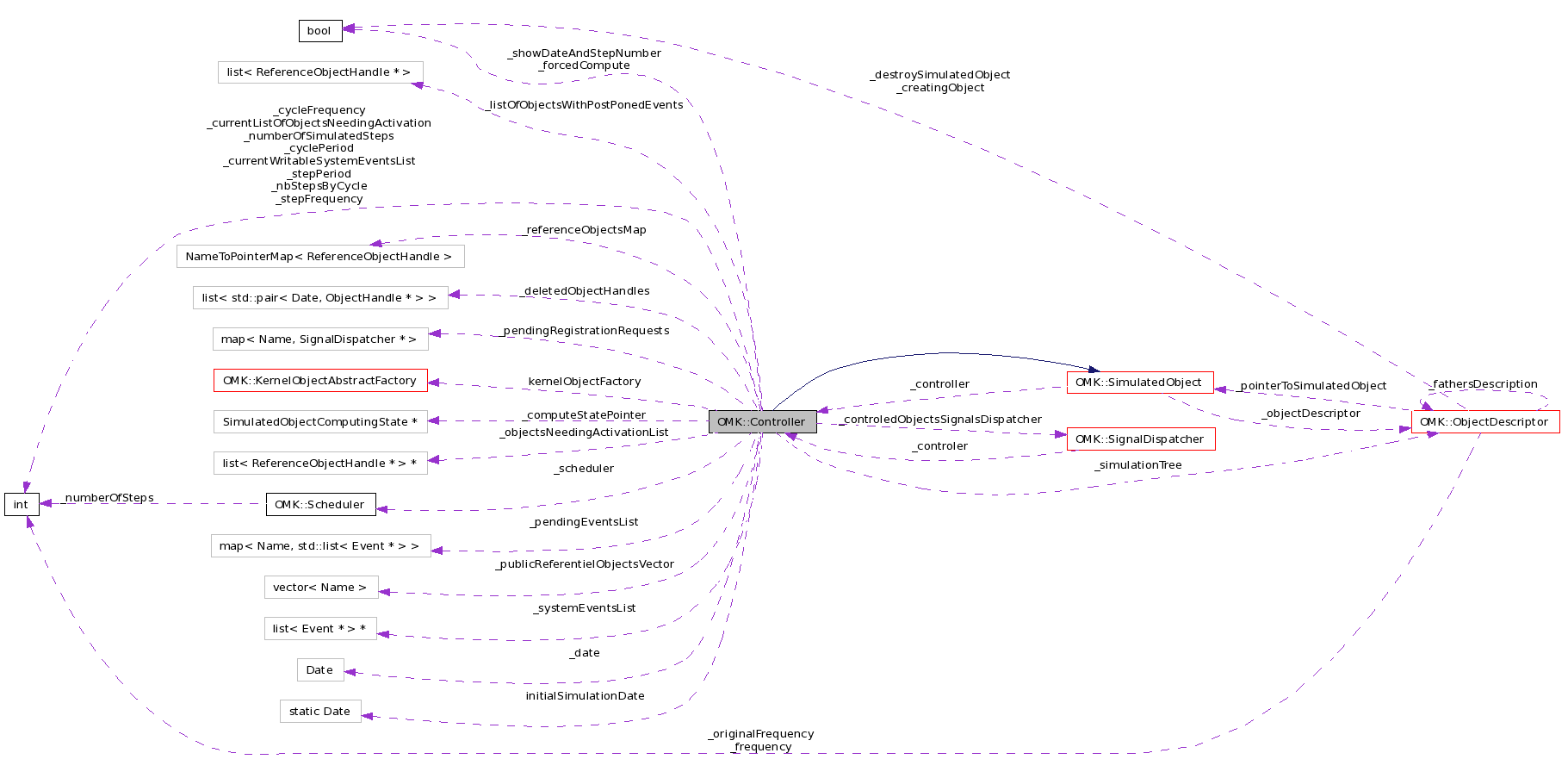
Protected Attributes | |
| NameToPointerMap< ReferenceObjectHandle > | _referenceObjectsMap |
| data structure containing references to the ReferenceObjectHandlers | |
| ObjectDescriptor & | _simulationTree |
| the simulation tree this controller is root of This has to be a reference to a allready constructed simulation tree, because the root descriptor of that tree is used a parameter of the ancestors constructor wich keeps a reference of that descriptor. | |
| unsigned long int | _numberOfSimulatedSteps |
| number of simulated steps up to now | |
| Frequency | _stepFrequency |
| frequency of a simulation step | |
| int | _cycleFrequency |
| the frequency at wich activation patterns repeat themselves | |
| int | _cyclePeriod |
| duration in simulated time of a simualtion cycle | |
| int | _nbStepsByCycle |
| number of simulation step by cycle : we have _cycleFrequency * stepFrequency = _nbStepsByCycle | |
| int | _stepPeriod |
| _stepPeriod. | |
| Date | _date |
| simulated date | |
| bool | _showDateAndStepNumber |
| flag indicating if the date and simulation step number are printed | |
| ReferenceObjectHandle::SimulatedObjectComputingState * | _computeStatePointer |
| a pointer for easy access to th computationnel state of the controller : if the controller is controlling itsekg, this computationnal state should be : running | |
| SignalDispatcher | _controledObjectsSignalsDispatcher |
| signal dispatcher for objects interested in a signal whatever it's producer | |
| bool | _forcedCompute |
| to enable computations even in suspendedState, when the controller is controlled | |
| Scheduler * | _scheduler |
| the scheduler | |
| std::list< ReferenceObjectHandle * > * | _objectsNeedingActivationList [2] |
| double buffered list of controlled object needing activation because they have received events Protect usage with _mutexForListEvt ; | |
| int | _currentListOfObjectsNeedingActivation |
| 1 - _currentListOfObjectsNeedingActivation is used to store new object needing activation | |
| std::list< Event * > * | _systemEventsList [2] |
| double buffered system event list | |
| unsigned int | _currentWritableSystemEventsList |
| _systemEventsList[_currentWritableSystemEventsList] is used to store system events sent to controlled objects | |
| std::list< ReferenceObjectHandle * > | _listOfObjectsWithPostPonedEvents |
| list of objects with postponed events | |
| std::map< Name, std::list< Event * > > | _pendingEventsList |
| list of pending events (events sent to unknown objects) | |
| std::map< Name, SignalDispatcher * > | _pendingRegistrationRequests |
| map of pending registration requests | |
| std::list< std::pair< Date, ObjectHandle * > > | _deletedObjectHandles |
| the list of recently deleted object handles. | |
Static Private Attributes | |
| static KernelObjectAbstractFactory * | kernelObjectFactory |
| the kernel object factory used to create attribute of controlled object | |
Friends | |
| class | InputNT |
| class | OMK::SimulatedObject |
A controller is in charge of simulating time and activating objects whose evolution is time related.
Definition at line 53 of file OMKController.h.
| typedef std::pair< Name,Name > OMK::Controller::MigrationObjectPrm |
Definition at line 113 of file OMKController.h.
| typedef std::pair< ObjectDescriptor,Name > OMK::Controller::CreateObjectPrm |
| Controller::Controller | ( | ObjectDescriptor & | simulationTree, | |
| const Date & | initialDate | |||
| ) |
constructor for a classic controller
| initialObjects | the simulation tree describing the initial simulated objects to create. The root element of that tree is considered as describing the controller, and therfore it's class is ignored | |
| initialDate | the date at wich the simualtion is going to start |
Definition at line 67 of file OMKController.cpp.
References _computeStatePointer, _currentListOfObjectsNeedingActivation, _currentWritableSystemEventsList, OMK::ObjectDescriptor::_destroySimulatedObject, OMK::SimulatedObject::_objectHandle, _objectsNeedingActivationList, OMK::ObjectDescriptor::_pointerToSimulatedObject, _simulationTree, _systemEventsList, OMK::Type::PolatorNT::Constant, OMK::Type::PolatorNT::ConstantContinuous, createReferenceObjectHandle(), OMK::Type::PolatorNT::Cubic, OMK::Type::PolatorNT::CubicContinuous, OMK::Type::PolatorNT::defaultPrecisionLevel, OMK::ParametersAccessor::get(), OMK::ConfigurationParameterDescriptor::getAssociatedString(), OMK::SimulatedObject::getConfigurationParameters(), OMK::ConfigurationParameterDescriptor::getSubDescriptorByName(), OMK::ReferenceObjectHandle::initial, initialSimulationDate, OMK::Type::PolatorNT::Linear, OMK::Type::PolatorNT::LinearContinuous, OMASSERT, OMERROR, OMK_DEBUG_ERROR, OMK_DEBUG_FATAL_ERROR, OMK_DEBUG_MESSAGE, OMK_DEBUG_WARNING, OMK::Type::PolatorNT::Quadratic, and OMK::Type::PolatorNT::QuadraticContinuous.
00069 : SimulatedObject(*this, initialObjects ), 00070 _simulationTree( initialObjects ), 00071 _numberOfSimulatedSteps( 0 ), 00072 _nbStepsByCycle( 0 ), 00073 _date( initialDate ), 00074 _showDateAndStepNumber( false ), 00075 _controledObjectsSignalsDispatcher( *this ), 00076 _forcedCompute( false ), 00077 _scheduler( NULL ) 00078 { 00079 // These flags are always traced 00080 OBT::Singleton<OBT::Tracer>::getInstance().registerId( OMK_DEBUG_WARNING ) ; 00081 OBT::Singleton<OBT::Tracer>::getInstance().registerId( OMK_DEBUG_FATAL_ERROR ) ; 00082 OBT::Singleton<OBT::Tracer>::getInstance().registerId( OMK_DEBUG_ERROR ) ; 00083 OBT::Singleton<OBT::Tracer>::getInstance().registerId( OMK_DEBUG_MESSAGE ) ; 00084 00085 //--- Tracer initialisation 00086 // The file 00087 std::string traceFile ; 00088 if( ParametersAccessor::get( getConfigurationParameters(), "TraceFile", traceFile ) ) 00089 { 00090 OBT::Singleton<OBT::Tracer>::getInstance().setFile( traceFile.c_str() ) ; 00091 } 00092 // The "trace all" flag 00093 bool traceAll = false ; 00094 if( ParametersAccessor::get( getConfigurationParameters(), "TraceAll", traceAll ) ) 00095 { 00096 OBT::Singleton<OBT::Tracer>::getInstance().traceAll( traceAll ) ; 00097 } 00098 // The ids to register 00099 std::vector< std::string > traceIds ; 00100 if( ParametersAccessor::get( getConfigurationParameters(), "TraceIds", traceIds ) ) 00101 { 00102 for( std::vector< std::string >::const_iterator i = traceIds.begin() ; 00103 i != traceIds.end() ; 00104 i++ ) 00105 { 00106 OBT::Singleton<OBT::Tracer>::getInstance().registerId( i->c_str() ) ; 00107 } 00108 } 00109 00110 if (getConfigurationParameters()) 00111 { 00112 const ConfigurationParameterDescriptor* defaultPolatorParams= 00113 getConfigurationParameters()->getSubDescriptorByName("defaultPolatorPrecisionLevel"); 00114 if(defaultPolatorParams) 00115 { 00116 if(defaultPolatorParams->getAssociatedString()=="Constant") 00117 OMK::Type::PolatorNT::defaultPrecisionLevel=OMK::Type::PolatorNT::Constant; 00118 else if(defaultPolatorParams->getAssociatedString()=="Linear") 00119 OMK::Type::PolatorNT::defaultPrecisionLevel=OMK::Type::PolatorNT::Linear; 00120 else if(defaultPolatorParams->getAssociatedString()=="Quadratic") 00121 OMK::Type::PolatorNT::defaultPrecisionLevel=OMK::Type::PolatorNT::Quadratic; 00122 else if(defaultPolatorParams->getAssociatedString()=="Cubic") 00123 OMK::Type::PolatorNT::defaultPrecisionLevel=OMK::Type::PolatorNT::Cubic; 00124 else if(defaultPolatorParams->getAssociatedString()=="ConstantContinuous") 00125 OMK::Type::PolatorNT::defaultPrecisionLevel=OMK::Type::PolatorNT::ConstantContinuous; 00126 else if(defaultPolatorParams->getAssociatedString()=="LinearContinuous") 00127 OMK::Type::PolatorNT::defaultPrecisionLevel=OMK::Type::PolatorNT::LinearContinuous; 00128 else if(defaultPolatorParams->getAssociatedString()=="QuadraticContinuous") 00129 OMK::Type::PolatorNT::defaultPrecisionLevel=OMK::Type::PolatorNT::QuadraticContinuous; 00130 else if(defaultPolatorParams->getAssociatedString()=="CubicContinuous") 00131 OMK::Type::PolatorNT::defaultPrecisionLevel=OMK::Type::PolatorNT::CubicContinuous; 00132 else 00133 OMERROR( "This default polator is unknown: " 00134 << defaultPolatorParams->getAssociatedString() ) ; 00135 } 00136 } 00137 00138 initialSimulationDate = initialDate ; 00139 00140 //as a controller created throught this constructor has no controller, create the illusion of being handled 00141 _objectHandle = createReferenceObjectHandle( *this ) ; 00142 _computeStatePointer = const_cast<ReferenceObjectHandle::SimulatedObjectComputingState *>(&(dynamic_cast<ReferenceObjectHandle *>(_objectHandle)->getComputingState () )) ; 00143 00144 //connect the object description to the controller 00145 _simulationTree._pointerToSimulatedObject = this ; 00146 _simulationTree._destroySimulatedObject = false ; 00147 00148 //create data structures for system events managed by the controller 00149 _systemEventsList[ 0 ] = new list< Event * >() ; 00150 _systemEventsList[ 1 ] = new list< Event * >() ; 00151 _currentWritableSystemEventsList = 0 ; 00152 00153 //create data structures to keep track of objects needing activation because they have pending events 00154 _objectsNeedingActivationList[ 0 ] = new list< ReferenceObjectHandle * >() ; 00155 _objectsNeedingActivationList[ 1 ] = new list< ReferenceObjectHandle * >() ; 00156 _currentListOfObjectsNeedingActivation = 0 ; 00157 00158 // initialisation of controller state 00159 OMASSERT( _computeStatePointer != 0 ) ; 00160 *_computeStatePointer = ReferenceObjectHandle::initial ; 00161 }
| Controller::~Controller | ( | ) | [virtual] |
destructor
Definition at line 177 of file OMKController.cpp.
References _date, OMK::SimulatedObject::_objectHandle, _objectsNeedingActivationList, _pendingRegistrationRequests, _scheduler, _stepPeriod, _systemEventsList, and purgeMemoryFromOldEvents().
00178 { 00179 delete _scheduler ; 00180 00181 // destruction of data structures related to event handling 00182 delete _systemEventsList[ 0 ] ; 00183 delete _systemEventsList[ 1 ] ; 00184 delete _objectsNeedingActivationList[ 0 ] ; 00185 delete _objectsNeedingActivationList[ 1 ] ; 00186 00187 purgeMemoryFromOldEvents ( _date + _stepPeriod ) ; 00188 00189 // destruction of pending registrations 00190 for( map< Name, SignalDispatcher * >::iterator i = _pendingRegistrationRequests.begin() ; 00191 i != _pendingRegistrationRequests.end() ; 00192 ++i ) 00193 { 00194 // delete the signal dispatcher 00195 delete i->second ; 00196 // removal from the map omitted, because automatic at destruction of the data member 00197 } 00198 delete _objectHandle ; 00199 }
| void Controller::init | ( | ) | [virtual] |
initialise the object.
Use this member function for any initilisation than can only be done when all the simulated objects have been created. In particular, plugging the input of the objects should be done here. By default, this member function calls the initialisation of the associated computational object.
Reimplemented from OMK::SimulatedObject.
Reimplemented in OMK::PvmController.
Definition at line 476 of file OMKController.cpp.
References _date, _referenceObjectsMap, _simulationTree, _stepFrequency, _stepPeriod, advanceSimulatedDate(), computeScheduling(), createControlledObjects(), getCycleFrequency(), OMK::SimulatedObject::getName(), OMK::SimulatedObject::getObjectHandle(), initialSimulationDate, OMMESSAGE, scheduleControlledObjects(), and sendInitialEventsTo().
Referenced by OMK::PvmController::init(), and processEvent().
00476 { 00477 00478 NameToPointerMap<ReferenceObjectHandle>::iterator pTab; 00479 00480 computeScheduling(true) ; 00481 00482 ostringstream warningMessage ; 00483 OMMESSAGE( "Controller::init :"<< endl 00484 << "controler's cycle frequency : " << getCycleFrequency() <<" Hz"<< endl 00485 << "controler's step frequency : " << _stepFrequency <<" Hz"<< endl 00486 << "stepPeriod " << _stepPeriod << endl 00487 ) ; 00488 00489 createControlledObjects ( &_simulationTree ) ; 00490 00491 scheduleControlledObjects() ; 00492 00493 _referenceObjectsMap.addObjectWithIndex (getName(), (ReferenceObjectHandle *)getObjectHandle()); 00494 00495 NameToPointerMap<InputNT>::iterator i; 00496 00497 //pretend init order was sent just before initialsimulationDate 00498 _date = Controller::initialSimulationDate - _stepPeriod ; 00499 00500 //all initial simulation objects are started 00501 for ( pTab = _referenceObjectsMap.begin(); 00502 pTab != _referenceObjectsMap.end(); 00503 pTab++ ) 00504 { 00505 sendInitialEventsTo ( *(*pTab).second, _date ) ; 00506 } 00507 00508 advanceSimulatedDate() ; 00509 00510 //only if initialisation happens at a different simulation date than the first simulation step 00511 //reactToControlledObjectsSystemEvents(); 00512 } 00513
| void Controller::run | ( | ) | [virtual] |
run Start the controller on a infinite loop which will be broken if system events are sent to the controller
Reimplemented in OMK::PvmController.
Definition at line 516 of file OMKController.cpp.
References _computeStatePointer, OMK::SimulatedObject::_objectHandle, OMASSERT, runControllersStep(), and OMK::ReferenceObjectHandle::running.
Referenced by OMK::PvmController::run().
00516 { 00517 ReferenceObjectHandle * objectHandle = dynamic_cast<ReferenceObjectHandle *> ( _objectHandle ) ; 00518 OMASSERT ( objectHandle != NULL ) ; 00519 *_computeStatePointer = ReferenceObjectHandle::running ; 00520 while(*_computeStatePointer == ReferenceObjectHandle::running) 00521 { 00522 runControllersStep (objectHandle) ; 00523 }//while 00524 } 00525
| std::list< const ObjectDescriptor * > * OMK::Controller::listDescendantsOfType | ( | const Name & | objectName | ) | [inline] |
List the descendants of an object that are of a certain type.
| objectName | : the ancestor object |
Definition at line 676 of file OMKController.h.
References OMK::ObjectDescriptor::findDescendantNamed(), and OMK::SimulatedObject::getObjectDescriptor().
00677 { 00678 const ObjectDescriptor * objectDescriptor = getObjectDescriptor ().findDescendantNamed ( objectName ) ; 00679 if ( objectDescriptor != NULL ) 00680 { 00681 return objectDescriptor->template listDescendantsOfType<Type> () ; 00682 } 00683 else 00684 { 00685 return new std::list<const ObjectDescriptor *>() ; 00686 } 00687 }
| std::list< const ObjectDescriptor * > * OMK::Controller::listBrothersOfType | ( | const Name | objectName | ) | [inline] |
list brothers of objectName in the simulation tree of that are of type t
| objectName | : name of the brother |
Definition at line 695 of file OMKController.h.
References OMK::ObjectDescriptor::findDescendantNamed(), OMK::ObjectDescriptor::getFathersObjectDescriptor(), and OMK::SimulatedObject::getObjectDescriptor().
00696 { 00697 const ObjectDescriptor * objectDescriptor = getObjectDescriptor ().findDescendantNamed ( objectName ) ; 00698 if ( objectDescriptor != NULL ) 00699 { 00700 objectDescriptor = objectDescriptor->getFathersObjectDescriptor() ; 00701 if ( objectDescriptor != NULL ) 00702 { 00703 return objectDescriptor->template listBrothersOfType<Type> () ; 00704 } 00705 else 00706 { 00707 return new std::list<const ObjectDescriptor *>() ; 00708 } 00709 } 00710 else 00711 { 00712 return new std::list<const ObjectDescriptor *>() ; 00713 } 00714 }
| void Controller::computeNextSimulationStep | ( | ) | [protected, virtual] |
compute the next simulation step
Reimplemented in OMK::PvmController.
Definition at line 627 of file OMKController.cpp.
References _numberOfSimulatedSteps, _scheduler, OMK_DEBUG_OMK_EXEC, OMTRACEID, processEventsOfSuspendedObjects(), reactToControlledObjectsSystemEvents(), and OMK::Scheduler::runStep().
Referenced by compute(), and OMK::PvmController::computeNextSimulationStep().
00627 { 00628 OMTRACEID( OMK_DEBUG_OMK_EXEC, "Controller::computeNextSimulationStep calling reactToControlledObjectsSystemEvents " ) ; 00629 reactToControlledObjectsSystemEvents () ; 00630 OMTRACEID( OMK_DEBUG_OMK_EXEC, "done " ) ; 00631 _scheduler->runStep( (_numberOfSimulatedSteps - 1) % _nbStepsByCycle ) ; 00632 00633 processEventsOfSuspendedObjects () ; 00634 00635 OMTRACEID( OMK_DEBUG_OMK_EXEC, "Controller::computeNextSimulationStep done" ) ; 00636 } 00637
| void Controller::scheduleObject | ( | ReferenceObjectHandle * | ref | ) | [protected, virtual] |
add a simulated object to the appropriate execution frames, without flagging it as executable
| ref | the object handle of the simulated object |
Definition at line 387 of file OMKController.cpp.
Referenced by OMK::DistributedController::getPointerToSimulatedObjectNamed(), OMK::DistributedController::processEvent(), processNewObjectDeclaration(), reactToControlledObjectsSystemEvents(), and scheduleControlledObjects().
00398 { 00399 int nbFramesARaterPlusUn=int(_controller._stepFrequency/objectFrequency); 00400 00401 for(int minor=0;minor<_nbStepsByCycle;minor++) 00402 { 00403 if (minor%nbFramesARaterPlusUn==0) 00404 { //earliest execution 00405 _scheduler->addToScheduable( ref , minor ); 00406 } 00407 } 00408 if ( ref->getComputingState() == ReferenceObjectHandle::running ) 00409 { 00410 _scheduler->schedule ( ref ) ; 00411 } 00412 } 00413 } 00414
| void Controller::processStartEventAfterMorphose | ( | ReferenceObjectHandle * | objectHandle | ) |
CHADI.
Definition at line 1305 of file OMKController.cpp.
References _scheduler, OMK::ReferenceObjectHandle::getComputingState(), OMK::ReferenceObjectHandle::initial, noActivationNeededFor(), OMK::ReferenceObjectHandle::running, OMK::Scheduler::schedule(), and setComputingState().
Referenced by OMK::DistributedController::processEvent().
01305 { 01306 01307 if(objectHandle->getComputingState() == ReferenceObjectHandle::initial) 01308 { 01309 setComputingState (objectHandle, ReferenceObjectHandle::running ) ; 01310 noActivationNeededFor ( objectHandle ); 01311 01312 objectHandle->initAfterMorphose() ; 01313 01314 _scheduler->schedule( objectHandle ); 01315 } 01316 }
| void Controller::createLocalObject | ( | const ObjectDescriptor & | newLObjectDescription, | |
| const Name & | fathersLName | |||
| ) | [virtual] |
create a local object
Reimplemented in OMK::DistributedController.
Definition at line 653 of file OMKController.cpp.
References OMK::SimulatedObject::getName(), getSimulatedDate(), OMK::SystemEventIdentifier::MaskNewLocalObject, and OMK::SimulatedObject::sendEvent().
Referenced by OMK::DistributedController::createLocalObject().
00653 { 00654 // cout<<"je suis createObject, fathersName est :"<<fathersName<<endl; 00655 CreateObjectEvent creationEvent( SystemEventIdentifier::MaskNewLocalObject, 00656 getSimulatedDate(), 00657 getName(), 00658 getName(), 00659 CreateObjectType( CreateObjectPrm( newLObjectDescription, fathersLName ) ) ); 00660 sendEvent( creationEvent ) ; 00661 00662 00663 } 00664 //----------------------------------
| virtual int OMK::Controller::getMirrorsNbre | ( | ) | [inline, virtual] |
| virtual std::vector<Name> OMK::Controller::getMirrorList | ( | ) | [inline, virtual] |
| virtual std::vector<Name> OMK::Controller::getIsolatedMirrorList | ( | ) | [inline, virtual] |
Reimplemented in OMK::DistributedController, and OMK::PvmController.
Definition at line 110 of file OMKController.h.
| virtual std::vector<Name> OMK::Controller::getNonIsolatedMirrorList | ( | ) | [inline, virtual] |
Reimplemented in OMK::DistributedController, and OMK::PvmController.
Definition at line 111 of file OMKController.h.
| virtual bool OMK::Controller::testIfTroubleOccured | ( | ) | [inline, virtual] |
Reimplemented in OMK::DistributedController, and OMK::PvmController.
Definition at line 112 of file OMKController.h.
| virtual void OMK::Controller::createNewSite | ( | const Date & | ) | [inline, virtual] |
Reimplemented in OMK::DistributedController, and OMK::PvmController.
Definition at line 113 of file OMKController.h.
| OMK::Controller::DECLARE_TYPE_EVENT | ( | MigrationObjectPrm | , | |
| MigrationObject | ||||
| ) |
Definition at line 666 of file OMKController.cpp.
References OMK::SimulatedObject::getName(), getSimulatedDate(), OMK::SystemEventIdentifier::MaskMetamorphoseMirToRef, and OMK::SimulatedObject::sendEvent().
00666 { 00667 // sendValuedEvent( objectName, 00668 // "SystemEventIdentifier::MaskMetamorphoseMirToRef", 00669 // MigrationObjectType( MigrationObjectPrm( objectName, processName ) ) ) ; 00670 00671 MigrationObjectEvent migrationEvent( SystemEventIdentifier::MaskMetamorphoseMirToRef, 00672 getSimulatedDate(), 00673 getName(), 00674 getName(), 00675 MigrationObjectType( MigrationObjectPrm( objectName, processName ) ) ); 00676 sendEvent (migrationEvent) ; 00677 00678 00679 } 00680 //----------------------------------
| virtual std::list<Name> OMK::Controller::getDisconnectedProcessusList | ( | ) | [inline, virtual] |
compute an adequate Frequency for an object dynamically created Should be used to adapt the desired frequency when an simulated object is dynamically created so that the creation doesn't cause recomputation of the scheduling.
the result is the closest frequency to suggestedFrequency that can be inserted into the scheduler without changing the scheduling data structures. If two frequencies are at the same distance to correct frequencies, the higher frequency will be chosen. note : this member function should be delegated to the scheduler
Definition at line 418 of file OMKController.cpp.
References _stepFrequency, and getCycleFrequency().
Referenced by OMK::DistributedController::getPointerToSimulatedObjectNamed(), processNewObjectDeclaration(), and reactToControlledObjectsSystemEvents().
00418 { 00419 Frequency result = 0 ; 00420 if ( suggestedFrequency != 0 ) 00421 { 00422 list <Frequency> listOfAvailableFrequencies ; 00423 00424 // construct the list of frequencies that can be scheduled without changing the frame structure 00425 for ( int i = 1 ; i <= _nbStepsByCycle ; ++i ) 00426 { 00427 if ( _stepFrequency % i == 0 ) 00428 { 00429 listOfAvailableFrequencies.push_back(_stepFrequency / i ) ; 00430 } 00431 } 00432 00433 // find the closest frequency in listOfAvailableFrequencies to suggestedFrequency 00434 00435 list<Frequency>::const_iterator frequencyIterator = listOfAvailableFrequencies.begin() ; 00436 while ( frequencyIterator != listOfAvailableFrequencies.end() && 00437 ( suggestedFrequency <= *frequencyIterator ) ) 00438 { 00439 ++frequencyIterator ; 00440 } 00441 00442 if (frequencyIterator == listOfAvailableFrequencies.end() ) 00443 { //the suggested frequency is < _cycleFrequency 00444 result = getCycleFrequency() ; //cannot schedule object slower than _cycleFrequency 00445 } 00446 else 00447 { 00448 if ( frequencyIterator == listOfAvailableFrequencies.begin() ) 00449 { // *(listOfAvailableFrequencies.begin()) == _stepFrequency < suggestedFrequency 00450 result = _stepFrequency ; //cannot scheduleObject faster the _stepFrequency 00451 } 00452 else 00453 { // *(frequencyIterator) < suggestedFrequency <= *(frequencyIterator--) 00454 Frequency lowerEstimate = *frequencyIterator ; 00455 -- frequencyIterator ; 00456 Frequency higherEstimate = *frequencyIterator ; 00457 00458 // lowerEstimate < suggestedFrequency <= higherEstimate 00459 if ( (suggestedFrequency - lowerEstimate) < (higherEstimate - suggestedFrequency) ) 00460 { 00461 result = lowerEstimate ; 00462 } 00463 else 00464 { 00465 result = higherEstimate ; 00466 } 00467 } 00468 } 00469 } 00470 return result ; 00471 } 00472
| void Controller::runControllersStep | ( | ReferenceObjectHandle * | objectHandle | ) | [virtual] |
run a controllers simulation step.
To be used by the code controlling the simulation loop (generally run or the interface
Definition at line 528 of file OMKController.cpp.
References _computeStatePointer, _forcedCompute, OMK::ReferenceObjectHandle::compute(), OMASSERT, OMK_DEBUG_OMK_EXEC, OMTRACEID, OMK::ReferenceObjectHandle::processEvents(), and OMK::ReferenceObjectHandle::running.
Referenced by run().
00528 { 00529 OMTRACEID( OMK_DEBUG_OMK_EXEC, "Controller::runControllersStep" ) ; 00530 OMASSERT ( objectHandle != NULL ); 00531 _forcedCompute = true ; 00532 00533 //the controller has to process system events adressed to itself 00534 objectHandle->processEvents() ; 00535 00536 //the controller has schedule itself 00537 if( (*_computeStatePointer == ReferenceObjectHandle::running) || 00538 _forcedCompute ) 00539 { 00540 objectHandle->compute(); 00541 } 00542 _forcedCompute = false ; 00543 } 00544
| void Controller::compute | ( | ) | [virtual] |
computes a new simulation step for all controlled objects, if the controller is in the running state, otherwise jsut react to system events sent to controlled objects
Reimplemented from OMK::SimulatedObject.
Definition at line 546 of file OMKController.cpp.
References advanceSimulatedDate(), computeNextSimulationStep(), getPurgeDate(), and purgeMemoryFromOldEvents().
00546 { 00547 computeNextSimulationStep(); 00548 purgeMemoryFromOldEvents ( getPurgeDate() ) ; 00549 advanceSimulatedDate(); 00550 } 00551
| void Controller::finish | ( | ) | [virtual] |
finish the simulation.
called when MaskStop is received by the controller
Reimplemented from OMK::SimulatedObject.
Reimplemented in OMK::PvmController.
Definition at line 163 of file OMKController.cpp.
References _simulationTree, destroyObject(), OMK::ObjectDescriptor::getSons(), OMASSERT, OMK_DEBUG_OMK_EXEC, and OMTRACEID.
Referenced by OMK::PvmController::finish(), processEvent(), and reactToControlledObjectsSystemEvents().
00164 { 00165 OMTRACEID( OMK_DEBUG_OMK_EXEC, "Controller::finish()" ) ; 00166 //call destroyObject on all the sons 00167 for ( ObjectDescriptor::SonsContainerType::iterator i = _simulationTree.getSons().begin() ; 00168 i != _simulationTree.getSons().end() ; 00169 ++i ) 00170 { 00171 OMASSERT ( (*i) != NULL ) ; 00172 destroyObject ( (*i)->getName() ,true ) ; 00173 } 00174 }
| MultipleConfigurationParameter * Controller::getSchedulingParametersOfObject | ( | ObjectDescriptor & | ) | [protected] |
get a modifiable version of the scheduling parameters of an object.
Defined here for use by derived controllers
Definition at line 1608 of file OMKController.cpp.
References OMK::ObjectDescriptor::getSchedulingParameters().
Referenced by OMK::PvmController::PvmController().
01608 { 01609 return objectDescription.getSchedulingParameters () ; 01610 } 01611
| SimulatedObject * Controller::createDescribedObject | ( | const ObjectDescriptor * | description | ) | [protected] |
createDescribedObject.
Create a simulated object coresponding to the descriptor given as parameter, and update the descriptor accordingly object created are
Definition at line 952 of file OMKController.cpp.
References OMK::ObjectDescriptor::createDescribedObject().
Referenced by OMK::DistributedController::createDuplicatedObject(), OMK::DistributedController::createMirrorObject(), createReferenceObject(), and OMK::DistributedController::getPointerToSimulatedObjectNamed().
00952 { 00953 SimulatedObject * obj = description->createDescribedObject() ; 00954 00955 return obj; 00956 } 00957
| void Controller::setProcessOfDescriptor | ( | ObjectDescriptor & | objectDescription, | |
| const Name & | newProcessName | |||
| ) | [protected, virtual] |
Definition at line 1613 of file OMKController.cpp.
References OMK::ObjectDescriptor::setProcess().
Referenced by OMK::PvmController::PvmController().
01613 { 01614 objectDescription.setProcess ( newProcessName ) ; 01615 } 01616 }
| void Controller::error | ( | const char * | mess | ) | [static] |
included for ascendant compatibility : raises a OMKUserException with the message passed as parameter
| errorMessage | the message associated to the user exception |
Definition at line 1154 of file OMKController.cpp.
Referenced by OMK::SimulatedObject::addInputAlias(), OMK::PvmSvm::addNewWorkstation(), OMK::SimulatedObject::addOutputAlias(), OMK::SimulatedObject::addSensitiveInputAlias(), OMK::SimulatedObject::addSensitiveNotifyingInputAlias(), OMK::KernelObjectAbstractFactory::createControlParameter(), OMK::KernelObjectAbstractFactory::createInput(), OMK::KernelObjectAbstractFactory::createInputAlias(), OMK::KernelObjectAbstractFactory::createOutput(), OMK::KernelObjectAbstractFactory::createOutputAlias(), OMK::KernelObjectAbstractFactory::createSensitiveInput(), OMK::KernelObjectAbstractFactory::createSensitiveInputAlias(), OMK::KernelObjectAbstractFactory::createSensitiveNotifyingInput(), OMK::KernelObjectAbstractFactory::createSensitiveNotifyingInputAlias(), getPointerToDuplicatedObjectNamed(), OMK::ReferenceObjectHandle::insertInStream(), OMK::PvmReferenceObjectHandle::insertInStream(), OMK::PvmController::parseSynchronisationMessage(), and OMK::PvmSvm::spawnProcess().
01154 { 01155 throw UserException( Errormess ) ; 01156 } 01157
| void Controller::showDateAndStepNumber | ( | bool | show = true |
) |
ask the controller to print (or not) to sdterr (cerr) the simulation date and the step number
| show | if true information will be printed |
Definition at line 1149 of file OMKController.cpp.
References _showDateAndStepNumber.
01149 { 01150 _showDateAndStepNumber = show ; 01151 } 01152
| const Date & Controller::getSimulatedDate | ( | ) | const [virtual] |
Returns a reference to an allways accurate simulation date, in ms.
Reimplemented from OMK::SimulatedObject.
Definition at line 1101 of file OMKController.cpp.
References _date.
Referenced by OMK::ReferenceObjectHandle::compute(), OMK::HumanoRecorder::computeParameters(), createLocalObject(), createObject(), OMK::SimulatedObject::getSimulatedDate(), OMK::Output< T >::localGet(), migrateObjectToProcess(), OMK::PvmController::parseSynchronisationMessage(), OMK::DistributedController::processEvent(), OMK::ReferenceObjectHandle::processEvents(), OMK::Svm::relaxedSynchroniseReceiveAndProcessMessages(), OMK::SimulatedObject::sendEvent(), OMK::PvmMirrorObjectHandle::sendRequestToReferenceObject(), OMK::SimulatedObject::sendValuedEvent(), OMK::Output< T >::suggest(), OMK::Svm::synchroniseReceiveAndProcessMessages(), OMK::PvmMirrorObjectHandle::unpack(), and OMK::PvmController::~PvmController().
01101 { 01102 return _date; 01103 } 01104
| int Controller::getCycleFrequency | ( | ) | const [virtual] |
get the simulation cycle frequency
Definition at line 1112 of file OMKController.cpp.
References _cycleFrequency.
Referenced by computeAdequateFrequency(), computeScheduling(), and init().
01112 { 01113 return _cycleFrequency ; 01114 } 01115
| int Controller::getCyclePeriod | ( | ) | const [virtual] |
get the simulation cycle period, in simulated time (in ms)
Definition at line 1118 of file OMKController.cpp.
References _cyclePeriod.
Referenced by OMK::PvmMirrorObjectHandle::unpack().
01118 { 01119 return _cyclePeriod ; 01120 } 01121
| OMK::Controller::DECLARE_TYPE_EVENT | ( | CreateObjectPrm | , | |
| CreateObject | ||||
| ) |
| void Controller::createObject | ( | const ObjectDescriptor & | newObjectDescription, | |
| const Name & | fathersName | |||
| ) | [virtual] |
creation of an object unknown of in the simulation tree.
this sends an appropriate valued event to the controller, which is interpreted at the next simulation step this interpretation will add the object in the simulation tree, and create it. The object will be inserted in the scheduling data structures with the specified frequency, wich could imply a call to computeScheduling (false) (
| fathersName | the name of the father of the object in the simulation tree | |
| newObjectDescription | a description of the object to create |
Reimplemented in OMK::DistributedController.
Definition at line 641 of file OMKController.cpp.
References OMK::SimulatedObject::getName(), getSimulatedDate(), OMK::SystemEventIdentifier::MaskNewObject, and OMK::SimulatedObject::sendEvent().
Referenced by OMK::DistributedController::createObject().
00641 { 00642 CreateObjectEvent creationEvent( SystemEventIdentifier::MaskNewObject, 00643 getSimulatedDate(), 00644 getName(), 00645 getName(), 00646 CreateObjectType( CreateObjectPrm( newObjectDescription, fathersName ) ) ); 00647 sendEvent (creationEvent) ; 00648 } 00649
destroy a simulated object.
Delete any data structure related to the specified object, including its description in the simulation tree. Sends MaskStop then MaskDelete to the object, and optionnaly recursively to the sons of the object effective destruction takes place at the next simulation step
| name | : the name of the object to destroy | |
| recursive | : destroy recursively the sons in the simulation of the specified object |
Definition at line 696 of file OMKController.cpp.
References _simulationTree, OMK::ObjectDescriptor::findDescendantNamed(), OMK::ObjectDescriptor::getSons(), OMK::SystemEventIdentifier::MaskDelete, OMK::SystemEventIdentifier::MaskStop, OMASSERT, OMERROR, and OMK::SimulatedObject::sendEvent().
Referenced by finish().
00696 { 00697 ObjectDescriptor * objectDescriptor = _simulationTree.findDescendantNamed ( name ) ; 00698 00699 if( objectDescriptor != NULL ) 00700 { 00701 if ( recursively ) 00702 { 00703 for ( ObjectDescriptor::SonsContainerType::iterator i = objectDescriptor->getSons().begin() ; 00704 i != objectDescriptor->getSons().end() ; 00705 ++i ) 00706 { 00707 OMASSERT ( (*i) != NULL ) ; 00708 destroyObject ( (*i)->getName() ,true ) ; 00709 } 00710 } 00711 sendEvent(name, SystemEventIdentifier::MaskStop); 00712 sendEvent(name, SystemEventIdentifier::MaskDelete); 00713 } 00714 else 00715 { 00716 OMERROR("Controller::destroyObject \"" << name << "\" not found" ) ; 00717 } 00718 } 00719
change the father of an object in the simulation tree.
Effective change at the next simulation step, but doesn't affect the scheduling data structures
| name | : the object which is changing father | |
| newfather | : the new father of the object |
Definition at line 732 of file OMKController.cpp.
References _simulationTree, OMK::ObjectDescriptor::findDescendantNamed(), OMK_DEBUG_OMK_EXEC, OMTRACEID, and OMK::ObjectDescriptor::setFathersDescription().
Referenced by OMK::DistributedController::processEvent(), and processEvent().
00732 { 00733 ObjectDescriptor * object = _simulationTree.findDescendantNamed ( name ) ; 00734 if ( object != NULL ) 00735 { 00736 ObjectDescriptor * father = _simulationTree.findDescendantNamed ( newFather ) ; 00737 if (father != NULL) 00738 { 00739 object->setFathersDescription( father ) ; 00740 } 00741 else 00742 { 00743 OMTRACEID( OMK_DEBUG_OMK_EXEC, "Controller::changeObjectsFather new father (\""<<newFather 00744 <<"\") for object \""<<name<<"\" doesn't exist" ) ; 00745 } 00746 } 00747 else 00748 { 00749 OMTRACEID( OMK_DEBUG_OMK_EXEC, "Controller::changeObjectsFather object \""<<name<<"\" doesn't exist" ) ; 00750 } 00751 } 00752
| void Controller::changeObjectsFather | ( | ObjectDescriptor * | object, | |
| ObjectDescriptor * | newFather | |||
| ) | [virtual] |
change the father of an object in the simulation tree.
Effective change at the next simulation step, but doesn't affect the scheduling data structures
| object | : the object which is changing father | |
| newfather | : the new father of the object |
Definition at line 723 of file OMKController.cpp.
References OMASSERT, and OMK::ObjectDescriptor::setFathersDescription().
00723 { 00724 OMASSERT ( object != NULL ) ; 00725 OMASSERT ( newFather != NULL ) ; 00726 object->setFathersDescription( newFather ) ; 00727 } 00728
| void Controller::computeScheduling | ( | bool | fromOriginal | ) | [protected, virtual] |
compute the scheduling data strucures.
| fromOriginal | boolean indiscating if the scheduling has to be computed from the original scheduling information or from the current scheduling information This member function is called when
|
Definition at line 226 of file OMKController.cpp.
References _date, _nbStepsByCycle, _referenceObjectsMap, _scheduler, _simulationTree, _stepFrequency, _stepPeriod, createScheduler(), OMK::SimulatedObject::fireSignal(), gcd(), getCycleFrequency(), OMK::ObjectDescriptor::getDescendants(), OMK::ObjectDescriptor::getFrequency(), OMK::SimulatedObject::getName(), OMK::ObjectDescriptor::getOriginalFrequency(), OMK::SystemEventIdentifier::MaskChangeObjectFrequency, OMK::SystemEventIdentifier::MaskControllerFrequencyChange, OMASSERT, OMK_DEBUG_OMK_EXEC, OMMESSAGE, OMTRACEID, OMK::ReferenceObjectHandle::receiveEvent(), setCycleFrequency(), and OMK::ObjectDescriptor::setFrequency().
Referenced by OMK::DistributedController::getPointerToSimulatedObjectNamed(), init(), processEvent(), processNewObjectDeclaration(), and reactToControlledObjectsSystemEvents().
00226 { 00227 OMMESSAGE( "Controller::computeScheduling at date " << _date ) ; 00228 00229 std::list<ObjectDescriptor * > objectDescriptorList ; 00230 int freq; 00231 00232 _simulationTree.getDescendants( &objectDescriptorList ); 00233 00234 list<ObjectDescriptor * >::iterator i ; 00235 00236 //remove objects with no frequency from the list 00237 i = objectDescriptorList.begin () ; 00238 00239 while ( i != objectDescriptorList.end() ) 00240 { 00241 if ( fromOriginal ) 00242 { 00243 if ((*i)->getOriginalFrequency() == 0 ) 00244 { 00245 i = objectDescriptorList.erase ( i ) ; 00246 } 00247 else 00248 { 00249 ++i ; 00250 } 00251 } 00252 else 00253 { 00254 if ( (*i)->getFrequency() == 0 ) 00255 { 00256 i = objectDescriptorList.erase ( i ) ; 00257 } 00258 else 00259 { 00260 ++i ; 00261 } 00262 } 00263 } 00264 00265 i = objectDescriptorList.begin () ; 00266 00267 if ( i == objectDescriptorList.end() ) 00268 { 00269 //no objects need regular activation 00270 if ( fromOriginal ) 00271 { 00272 _stepFrequency = _simulationTree.getOriginalFrequency() ; 00273 } 00274 else 00275 { 00276 _stepFrequency = _simulationTree.getFrequency() ; 00277 } 00278 if ( _stepFrequency == 0 ) 00279 { 00280 OMTRACEID( OMK_DEBUG_OMK_EXEC, "Controller needs a frequency: assigning 1" ) ; 00281 _stepFrequency = 1 ; 00282 } 00283 setCycleFrequency(_stepFrequency) ; 00284 } 00285 else 00286 { 00287 //initialise the loop with coherant values 00288 if (fromOriginal) 00289 { 00290 setCycleFrequency ( (*i)->getOriginalFrequency() ) ; 00291 } 00292 else 00293 { 00294 setCycleFrequency ( (*i)->getFrequency() ) ; 00295 } 00296 _stepFrequency = 1 ; 00297 } 00298 00299 while ( i != objectDescriptorList.end() ) 00300 { 00301 if (fromOriginal) 00302 { 00303 freq = (*i)->getOriginalFrequency() ; 00304 00305 if ( freq != (*i)->getFrequency() ) //the objects frequency has changed previously, 00306 { 00307 //reset it: 00308 (*i)->setFrequency ( freq ) ; 00309 00310 //send MaskChangeObjectFrequency to the object 00311 ReferenceObjectHandle * referenceObjectHandle = _referenceObjectsMap.getObjectOfIndex ((*i)->getName() ) ; 00312 if ( referenceObjectHandle != NULL ) 00313 { 00314 //use receive event is sub optimal, because MaskChangeObjectFrequency is a system event, thus implying a copy is sent back to the controller, whithout effect 00315 referenceObjectHandle->receiveEvent ( new ValuedEvent<Frequency> (SystemEventIdentifier::MaskChangeObjectFrequency, 00316 _date, 00317 getName(), 00318 (*i)->getName(), 00319 (*i)->getFrequency() ) ); 00320 } 00321 } 00322 } 00323 else 00324 { 00325 freq = (*i)->getFrequency() ; 00326 } 00327 00328 00329 if (freq != 0) 00330 { 00331 setCycleFrequency ( gcd( freq, getCycleFrequency() ) ) ; 00332 _stepFrequency=(int)((freq*_stepFrequency)/gcd(freq,_stepFrequency)); //lcm(freq,_stepFrequency); 00333 } 00334 00335 ++ i ; 00336 } 00337 00338 OMASSERT( _stepFrequency != 0 ) ; 00339 00340 if ( _stepFrequency != _simulationTree.getFrequency() ) 00341 {//the controller has changed frequency 00342 00343 _simulationTree.setFrequency( _stepFrequency ) ; 00344 00345 fireSignal(SystemEventIdentifier::MaskControllerFrequencyChange) ; 00346 } 00347 00348 _stepPeriod = int(1000./_stepFrequency); 00349 00350 00351 _nbStepsByCycle = _stepFrequency/getCycleFrequency() ; 00352 00353 if ( _scheduler != NULL ) delete _scheduler ; 00354 00355 _scheduler = createScheduler() ; 00356 00357 } 00358
| void Controller::sendInitialEventsTo | ( | ReferenceObjectHandle & | objectHandle, | |
| const Date & | dateOfMaskStart | |||
| ) | [protected, virtual] |
Send MaskStart to any created objects, and send any pending events which where stored (none by default) because send to an object before it was created.
Definition at line 831 of file OMKController.cpp.
References _pendingEventsList, OMK::ObjectDescriptor::getFrequency(), OMK::SimulatedObject::getName(), OMK::ObjectDescriptor::getName(), OMK::SimulatedObject::getObjectDescriptor(), OMK::ObjectHandle::getSimulatedObject(), OMK::SystemEventIdentifier::MaskStart, OMK::SystemEventIdentifier::MaskSuspend, OMK_DEBUG_OMK_EXEC, OMTRACEID, and OMK::SimulatedObject::sendEvent().
Referenced by OMK::DistributedController::getPointerToSimulatedObjectNamed(), init(), and processNewObjectDeclaration().
00831 { 00832 if( &objectHandle.getSimulatedObject() != this ) 00833 { 00834 OMTRACEID( OMK_DEBUG_OMK_EXEC, "Sending init event to \"" 00835 << objectHandle.getSimulatedObject().getObjectDescriptor().getName() 00836 << "\"" ) ; 00837 Event *startEvent = new Event( 00838 SystemEventIdentifier::MaskStart, 00839 dateOfMaskStart, 00840 getName(), 00841 objectHandle.getSimulatedObject().getObjectDescriptor().getName() ) ; 00842 sendEvent( startEvent ) ; 00843 00844 //objects whose frequency is 0 must be suspended 00845 if( objectHandle.getSimulatedObject().getObjectDescriptor().getFrequency() == 0 ) 00846 { 00847 sendEvent( &objectHandle.getSimulatedObject(),SystemEventIdentifier::MaskSuspend ) ; 00848 } 00849 00850 //send any pending events 00851 /* no mutex protection needed, because this is only called during 00852 controller's system event processing 00853 */ 00854 map< Name, list< Event * > >::iterator pendingEvents = 00855 _pendingEventsList.find( objectHandle.getSimulatedObject().getObjectDescriptor().getName() ) ; 00856 if( pendingEvents != _pendingEventsList.end() ) 00857 { 00858 OMTRACEID( OMK_DEBUG_OMK_EXEC, 00859 "Found pending events for \"" 00860 << objectHandle.getSimulatedObject().getObjectDescriptor().getName() 00861 << "\"" ) ; 00862 for( list< Event * >::iterator pendingEventsListIterator = 00863 pendingEvents->second.begin() ; 00864 pendingEventsListIterator != pendingEvents->second.end() ; 00865 ++pendingEventsListIterator ) 00866 { 00867 OMTRACEID( OMK_DEBUG_OMK_EXEC, "sent" << std::endl 00868 << **pendingEventsListIterator << std::endl 00869 << "to \"" 00870 << objectHandle.getSimulatedObject().getObjectDescriptor().getName() 00871 << "\"" ) ; 00872 objectHandle.getSimulatedObject().sendEvent( *pendingEventsListIterator ) ; 00873 } 00874 _pendingEventsList.erase( pendingEvents ) ; 00875 } 00876 } 00877 } 00878
| void Controller::deleteObject | ( | ObjectDescriptor * | objectDescription | ) | [protected, virtual] |
delete an object.
This member function performs destruction when MaskDelete is received for that object by doing the following
Reimplemented in OMK::DistributedController.
Definition at line 923 of file OMKController.cpp.
References _date, _deletedObjectHandles, OMK::ObjectDescriptor::getFathersObjectDescriptor(), OMK::ObjectDescriptor::getName(), OMK::SimulatedObject::getObjectDescriptor(), OMASSERT, OMK_DEBUG_OMK_EXEC, OMTRACEID, removeObjectFromDataStructures(), and OMK::ObjectDescriptor::removeSon().
Referenced by OMK::DistributedController::deleteObject(), and processDeleteEventOf().
00923 { 00924 OMTRACEID( OMK_DEBUG_OMK_EXEC, "Controller::deleteObject \"" << objectDescriptor->getName() << "\"" ) ; 00925 00926 00927 if (objectDescriptor != &getObjectDescriptor() ) 00928 //shouldn't delete oneself ! 00929 { 00930 OMASSERT ( objectDescriptor != NULL) ; 00931 00932 // remove from the kernel's data structures 00933 ObjectHandle * toDelete = removeObjectFromDataStructures( objectDescriptor->getName() ) ; 00934 00935 //remove the object descriptor from the simulation tree 00936 if ( objectDescriptor->getFathersObjectDescriptor() != objectDescriptor ) 00937 { 00938 objectDescriptor->getFathersObjectDescriptor()->removeSon ( objectDescriptor ) ; 00939 } 00940 00941 if ( toDelete != NULL ) 00942 { 00943 //put the object handle in the list of object to be deleted 00944 _deletedObjectHandles.push_back ( make_pair ( _date, toDelete) ) ; 00945 } 00946 } 00947 } 00948
| ObjectHandle * Controller::removeObjectFromDataStructures | ( | const Name & | ) | [protected, virtual] |
remove any reference to a simulated object from all the controller's data structures
Reimplemented in OMK::PvmController.
Definition at line 883 of file OMKController.cpp.
References _objectsNeedingActivationList.
Referenced by deleteObject(), and OMK::PvmController::removeObjectFromDataStructures().
00888 { 00889 _objectsNeedingActivationList[i]->remove( referentiel ); 00890 } 00891 00892 _listOfObjectsWithPostPonedEvents.remove ( referentiel ) ; 00893 00894 _referenceObjectsMap.erase(nom); 00895 00896 _scheduler->unschedule( referentiel ) ; 00897 00898 _scheduler->removeFromScheduable( referentiel ) ; 00899 00900 return referentiel; 00901 } 00902
| SimulatedObject * Controller::getPointerToDuplicatedObjectNamed | ( | const Name & | name | ) | [virtual] |
get a pointer to a simulated object
| name | the name of the object |
Definition at line 1007 of file OMKController.cpp.
References _referenceObjectsMap, OMK::ObjectDescriptor::DUPLICATED_OBJECT, error(), OMK::Name::getCString(), OMK::ObjectDescriptor::getDistribution(), OMK::SimulatedObject::getObjectDescriptor(), and getPointerToSimulatedObjectNamed().
01007 { 01008 std::string errorMSg = "Controller::getPointerToDuplicatedObjectNamed "; 01009 // The object is a referential object or we need to make of it a referential object 01010 SimulatedObject * result = getPointerToSimulatedObjectNamed( name ); 01011 if( !result ) 01012 { 01013 ReferenceObjectHandle * ref = _referenceObjectsMap.getObjectOfIndex( name ); 01014 if( !ref ) 01015 { 01016 errorMSg += "\n No object " ; 01017 errorMSg += name.getCString() ; 01018 errorMSg += " in processus" ; 01019 Controller::error( errorMSg.c_str() ); 01020 } 01021 } 01022 else if ( result->getObjectDescriptor().getDistribution() == ObjectDescriptor::DUPLICATED_OBJECT ) 01023 { 01024 errorMSg += ": Pointer to object : " ; 01025 errorMSg += name.getCString() ; 01026 errorMSg += " cannot be obtained : It is not a duplicated object" ; 01027 Controller::error( errorMSg.c_str() ); 01028 } 01029 return result; 01030 } 01031
| SimulatedObject * Controller::getPointerToSimulatedObjectNamed | ( | const Name & | name | ) | [virtual] |
get a pointer to a simulated object After return from this method, it's possible to query any method of the simulated object that doesn't depend on the evolution of that object, as the object returned can have been created specially by the call.
of course, querying the interface of that object (outputs control parameters and event listeners should yield a correct result after a least one simulation step
| name | the name of the object |
Reimplemented in OMK::DistributedController.
Definition at line 1034 of file OMKController.cpp.
References _deletedObjectHandles, _referenceObjectsMap, OMK::SimulatedObject::getName(), and OMK::ObjectHandle::getSimulatedObject().
Referenced by OMK::SimulatedObject::addInputAlias(), OMK::SimulatedObject::addOutputAlias(), OMK::SimulatedObject::addSensitiveInputAlias(), OMK::SimulatedObject::addSensitiveNotifyingInputAlias(), OMK::SimulatedObject::cancelRegistrationForSignalBy(), OMK::OutputNT::connect(), OMK::Input< T >::connect(), OMK::Input< T >::connectToControlParameter(), OMK::SimulatedObject::getFather(), getPointerToDuplicatedObjectNamed(), OMK::EventSignalEmitterUtil::loadParametersUtil(), reactToControlledObjectsSystemEvents(), OMK::Vis::VisBase::registerEventPlug(), OMK::SimulatedObject::registerForSignalBy(), OMK::SimulatedObject::sendEvent(), OMK::SignalDispatcher::sendEventsForSignal(), and OMK::SimulatedObject::sendValuedEvent().
01034 { 01035 SimulatedObject * resul = NULL ; 01036 //Two cases: object is already a referential or it is needed to make it a referential 01037 ReferenceObjectHandle * refe = _referenceObjectsMap.getObjectOfIndex(nom); 01038 if (refe==NULL) 01039 { 01040 if ( nom == getName() ) 01041 { 01042 resul = this ; 01043 } 01044 else 01045 { 01046 //the object might have just been deleted : look for it in _deletedObjectHandles 01047 list <pair <Date, ObjectHandle *> >::iterator i = _deletedObjectHandles.begin() ; 01048 while ( i != _deletedObjectHandles.end() ) 01049 { 01050 if (i->second->getSimulatedObject().getName() == nom ) 01051 { 01052 resul = & i->second->getSimulatedObject() ; 01053 i = _deletedObjectHandles.end() ; 01054 } 01055 else 01056 { 01057 ++i ; 01058 } 01059 } 01060 } 01061 } 01062 else 01063 { 01064 resul=&refe->getSimulatedObject(); 01065 } 01066 return resul; 01067 } 01068
| void Controller::processNewObjectDeclaration | ( | ObjectDescriptor & | declaration, | |
| const Date & | declarationDate | |||
| ) | [protected, virtual] |
processNewObjectDeclaration Once an object has been added to the simulation tree, this is called for creation and scheduling
Reimplemented in OMK::DistributedController.
Definition at line 961 of file OMKController.cpp.
References computeAdequateFrequency(), computeScheduling(), createReferenceObject(), OMK::ObjectDescriptor::getFrequency(), OMASSERT, scheduleControlledObjects(), scheduleObject(), and sendInitialEventsTo().
Referenced by processEvent(), and OMK::DistributedController::processNewObjectDeclaration().
00961 { 00962 ReferenceObjectHandle * objectHandle = createReferenceObject ( & declaration ) ; 00963 OMASSERT ( objectHandle != NULL ) ; 00964 if ( declaration.getFrequency() != computeAdequateFrequency ( declaration.getFrequency() ) ) 00965 { 00966 //the whole scheduling data structure needs recalculating 00967 computeScheduling ( false ) ; 00968 00969 //the new object will therefore be scheduled with all the others 00970 scheduleControlledObjects() ; 00971 } 00972 else 00973 { 00974 scheduleObject ( objectHandle ) ; 00975 } 00976 sendInitialEventsTo ( *objectHandle, declarationDate ) ; 00977 } 00978
| ReferenceObjectHandle * Controller::createReferenceObject | ( | const ObjectDescriptor * | idObjet | ) | [protected, virtual] |
createReferenceObject.
Effective creation of a reference object
Definition at line 982 of file OMKController.cpp.
References _referenceObjectsMap, createDescribedObject(), createReferenceObjectHandle(), OMK::ObjectDescriptor::getName(), OMASSERT, OMERROR, OMK_DEBUG_OMK_OBJ, and OMTRACEID.
Referenced by OMK::DistributedController::createControlledObjects(), createControlledObjects(), and processNewObjectDeclaration().
00983 { 00984 OMASSERT (objectDescription != NULL ); 00985 OMTRACEID( OMK_DEBUG_OMK_OBJ, "Controller::createReferenceObject " ) ; 00986 ReferenceObjectHandle * result = NULL ; 00987 00988 SimulatedObject * createdObject = createDescribedObject ( objectDescription ) ; 00989 00990 if (createdObject != NULL) 00991 { 00992 result = createReferenceObjectHandle (*createdObject); 00993 00994 _referenceObjectsMap.addObjectWithIndex (objectDescription->getName(), result); 00995 00996 } 00997 else 00998 { 00999 OMERROR( "Controller::createReferenceObject unable to create" << endl << *objectDescription ) ; 01000 } 01001 OMTRACEID( OMK_DEBUG_OMK_OBJ, "Controller::createReferenceObject ended" ) ; 01002 return result; 01003 } 01004
| const ObjectDescriptor & Controller::getObjectDescriptorOfObject | ( | const Name & | objectName | ) | [virtual] |
get the object descriptor of a given simulated object
| objectName | the name of the given object |
Reimplemented in OMK::DistributedController.
Definition at line 1070 of file OMKController.cpp.
References _deletedObjectHandles, _simulationTree, and OMK::ObjectDescriptor::findDescendantNamed().
Referenced by OMK::ParametersAccessor::getAndCheckObject().
01070 { 01071 // Benoit Chanclou 2006-04-03 avoid to two calls to findDescendantNamed (search in a list) 01072 const ObjectDescriptor * p_objDescriptor = _simulationTree.findDescendantNamed( objectName ) ; 01073 if ( p_objDescriptor ) 01074 { 01075 return *p_objDescriptor ; 01076 } 01077 else 01078 { 01079 //the object might have just been deleted : look for it in _deletedObjectHandles 01080 list <pair <Date, ObjectHandle *> >::iterator i = _deletedObjectHandles.begin() ; 01081 while ( i != _deletedObjectHandles.end() ) 01082 { 01083 if ( i->second->getSimulatedObject().getName() == objectName ) 01084 { 01085 return i->second->getSimulatedObject().getObjectDescriptor() ; 01086 } 01087 ++i ; 01088 } 01089 UserException e( "UnknownObject :" ) ; 01090 e << objectName ; 01091 throw e ; 01092 } 01093 } 01094
Definition at line 1125 of file OMKController.cpp.
Referenced by OMK::Process::Process(), and OMK::PvmController::PvmController().
Definition at line 1129 of file OMKController.cpp.
Referenced by computeScheduling().
01130 { 01131 // res = gcd (b, a % b) ; 01132 // } 01133 if ( b == 0 ) 01134 { 01135 if ( a == 0 ) 01136 { 01137 return 1 ; 01138 } 01139 return a ; 01140 } 01141 if ( a < b ) 01142 { 01143 return gcd( b, a ) ; 01144 } 01145 return gcd( b, a % b ) ; 01146 } 01147
| vector< Name > Controller::getReferentielList | ( | ) | [virtual] |
Definition at line 682 of file OMKController.cpp.
References _publicReferentielObjectsVector, and _referenceObjectsMap.
00682 { 00683 _publicReferentielObjectsVector.clear () ; 00684 for ( NameToPointerMap<ReferenceObjectHandle>::iterator i = _referenceObjectsMap.begin(); i!= _referenceObjectsMap.end(); i++ ) 00685 { 00686 _publicReferentielObjectsVector.push_back( i->first) ; 00687 } 00688 00689 return _publicReferentielObjectsVector; 00690 }
| Scheduler * Controller::createScheduler | ( | ) | [protected, virtual] |
create the scheduler that is in charge of effective scheduling of the controlled objects
Definition at line 361 of file OMKController.cpp.
References _nbStepsByCycle.
Referenced by computeScheduling().
00361 { 00362 00363 return new FrameScheduler ( _nbStepsByCycle ) ; 00364 00365 } 00366
| void Controller::scheduleControlledObjects | ( | ) | [protected, virtual] |
scheduleControlledObjects schedule all controlled reference objects
Definition at line 370 of file OMKController.cpp.
References _referenceObjectsMap, OMK::SimulatedObject::getObjectHandle(), and scheduleObject().
Referenced by OMK::DistributedController::getPointerToSimulatedObjectNamed(), init(), processEvent(), processNewObjectDeclaration(), and reactToControlledObjectsSystemEvents().
00370 { 00371 NameToPointerMap<ReferenceObjectHandle>::iterator pTab; 00372 00373 //for all controlled objects 00374 for (pTab=_referenceObjectsMap.begin(); pTab!= _referenceObjectsMap.end(); pTab++) 00375 { 00376 if ((*pTab).second != getObjectHandle() ) //a controller shouldn't schedule itself. 00377 { 00378 //schedule object correctly on the each frame of a cycle 00379 scheduleObject((*pTab).second); 00380 } 00381 } 00382 } 00383
| void Controller::advanceSimulatedDate | ( | ) | [protected, virtual] |
increment date and numberOfSimulatedSteps
Reimplemented in OMK::PvmController.
Definition at line 613 of file OMKController.cpp.
References _date, _numberOfSimulatedSteps, _showDateAndStepNumber, _stepPeriod, and OMMESSAGE.
Referenced by OMK::PvmController::advanceSimulatedDate(), compute(), and init().
00613 { 00614 00615 _numberOfSimulatedSteps++; 00616 00617 _date = _date + _stepPeriod; 00618 00619 if (_showDateAndStepNumber) 00620 { 00621 OMMESSAGE( "Controller starting simulation step number : " << _numberOfSimulatedSteps 00622 << " with date being "<<_date ) ; 00623 } 00624 } 00625
| void Controller::createControlledObjects | ( | const ObjectDescriptor * | subTree | ) | [protected, virtual] |
createControlledObjects Create a reference object for all objects of a simulation tree
Reimplemented in OMK::DistributedController.
Definition at line 202 of file OMKController.cpp.
References createReferenceObject(), OMK::ObjectDescriptor::getSons(), OMASSERT, OMK_DEBUG_OMK_OBJ, and OMTRACEID.
Referenced by init().
00203 { 00204 OMASSERT( subTree != NULL ) ; 00205 //go through the simulation tree to find all objects that have to be created 00206 list<ObjectDescriptor *>::const_iterator i = subTree->getSons()->begin() ; 00207 00208 while ( i != subTree->getSons()->end() ) 00209 { 00210 OMASSERT( *i != NULL ) ; 00211 OMTRACEID( OMK_DEBUG_OMK_OBJ, "Controller::createControlledObjects Creating \""<< (*i)->getName() << "\"" ) ; 00212 //create the object 00213 createReferenceObject ( *i ) ; 00214 00215 //create the subTree of that object 00216 createControlledObjects ( *i ) ; 00217 00218 OMTRACEID( OMK_DEBUG_OMK_OBJ, "Controller::createControlledObjects Created \""<< (*i)->getName() << "\"" ) ; 00219 ++i ; 00220 } 00221 } 00222
| void Controller::setCycleFrequency | ( | int | newFrequency | ) | [protected, virtual] |
Definition at line 1106 of file OMKController.cpp.
References _cycleFrequency, and _cyclePeriod.
Referenced by computeScheduling().
01106 { 01107 _cycleFrequency = newFreq ; 01108 _cyclePeriod = 1000/newFreq ; 01109 } 01110
| void Controller::actOnSystemEvent | ( | Event * | event | ) | [virtual] |
called when a reference object receives a system event
Definition at line 1164 of file OMKController.cpp.
References _currentWritableSystemEventsList, _systemEventsList, actOnSystemEvent(), OMK::Event::clone(), OMK::SimulatedObject::getController(), OMK::SimulatedObject::getName(), OMK::Event::insertInList(), and OMK::Event::receiver.
Referenced by actOnSystemEvent(), and OMK::ReferenceObjectHandle::receiveEvent().
01164 { 01165 // do not send a copy of a system event to oneself (avoids redundancy), except 01166 // if the controller is being controlled 01167 if( event->receiver != getName() ) 01168 { 01169 #ifdef _OMK_MUTEX_ 01170 _mutexSystemEventsList.protect() ; 01171 #endif 01172 Event::insertInList( _systemEventsList[ _currentWritableSystemEventsList ], 01173 event->clone() ) ; 01174 #ifdef _OMK_MUTEX_ 01175 _mutexSystemEventsList.unprotect() ; 01176 #endif 01177 } 01178 else if( this != & getController() ) 01179 { 01180 //the controller is being controlled : send a copy of the event to the 01181 // controllers controller 01182 getController().actOnSystemEvent( event ) ; 01183 } 01184 } 01185
| void Controller::reactToControlledObjectsSystemEvents | ( | ) | [virtual] |
process system events received by controlled objects
Definition at line 1332 of file OMKController.cpp.
References _currentWritableSystemEventsList, _referenceObjectsMap, _scheduler, _simulationTree, _systemEventsList, computeAdequateFrequency(), computeScheduling(), OMK::Event::eventId, OMK::ObjectDescriptor::findDescendantNamed(), finish(), OMK::ReferenceObjectHandle::getComputingState(), getPointerToSimulatedObjectNamed(), hasEventsToProcess(), OMK::SystemEventIdentifier::MaskChangeObjectFrequency, OMK::SystemEventIdentifier::MaskDelete, OMK::SystemEventIdentifier::MaskRestart, OMK::SystemEventIdentifier::MaskResume, OMK::SystemEventIdentifier::MaskStart, OMK::SystemEventIdentifier::MaskStop, OMK::SystemEventIdentifier::MaskSuspend, noActivationNeededFor(), OMASSERT, OMK_DEBUG_OMK_EVENT, OMK_DEBUG_OMK_EXEC, OMTRACEID, processDeleteEventOf(), OMK::ReferenceObjectHandle::processEvents(), processStartEventOf(), OMK::Event::receiver, OMK::Scheduler::removeFromScheduable(), OMK::ReferenceObjectHandle::running, OMK::Scheduler::schedule(), scheduleControlledObjects(), scheduleObject(), setComputingState(), OMK::ObjectDescriptor::setFrequency(), OMK::ReferenceObjectHandle::stopped, OMK::ReferenceObjectHandle::suspended, switchSystemEventList(), OMK::Scheduler::unschedule(), and OMK::ValuedEvent< UserType >::value.
Referenced by computeNextSimulationStep().
01332 { 01333 switchSystemEventList() ; 01334 list< Event * > & myEventList = *_systemEventsList [ 1 - _currentWritableSystemEventsList ] ; 01335 list< Event * >::iterator i = myEventList.begin() ; 01336 while ( i != myEventList.end() ) 01337 { 01338 SimulatedObject *receiverObject = getPointerToSimulatedObjectNamed( (*i)->receiver ) ; 01339 Event *currentEvent = (*i) ; 01340 01341 if( receiverObject == 0 ) 01342 { 01343 OMTRACEID( OMK_DEBUG_OMK_EXEC, 01344 "WARNING : object \"" << currentEvent ->receiver.getCString() 01345 <<"\", who has received event" << endl 01346 << *currentEvent << endl 01347 <<" doesn't exist (anymore)" ) ; 01348 } 01349 else 01350 { 01351 ReferenceObjectHandle *receiverReferential = dynamic_cast< ReferenceObjectHandle * >( receiverObject->getObjectHandle() ); 01352 OMASSERT( receiverReferential != 0 ) ; 01353 OMTRACEID( OMK_DEBUG_OMK_EVENT, *currentEvent << endl << " received by \"" <<receiverObject->getName() << "\"" ) ; 01354 if( currentEvent->eventId == SystemEventIdentifier::MaskStart ) 01355 { 01356 processStartEventOf ( receiverReferential ); 01357 } 01358 else if( currentEvent->eventId == SystemEventIdentifier::MaskStop ) 01359 { 01360 OMTRACEID( OMK_DEBUG_OMK_EVENT, "\"" << currentEvent->receiver <<"\" will be stopped " ) ; 01361 if( receiverReferential->getComputingState() == ReferenceObjectHandle::running || 01362 receiverReferential->getComputingState() == ReferenceObjectHandle::suspended ) 01363 { 01364 setComputingState( receiverReferential, ReferenceObjectHandle::stopped ); 01365 receiverReferential->processEvents() ; 01366 receiverObject -> finish() ; 01367 _scheduler->unschedule( receiverReferential ); 01368 } 01369 } 01370 else if( currentEvent->eventId == SystemEventIdentifier::MaskSuspend ) 01371 { 01372 OMTRACEID( OMK_DEBUG_OMK_EVENT, "\"" << currentEvent->receiver <<"\" will be suspended" ) ; 01373 if( receiverReferential->getComputingState() == ReferenceObjectHandle::running ) 01374 { 01375 setComputingState( receiverReferential, ReferenceObjectHandle::suspended ) ; 01376 // MaskSuspend will be treated at the end of the time step + with present events 01377 hasEventsToProcess( receiverReferential ) ; 01378 _scheduler->unschedule( receiverReferential ); 01379 } 01380 else 01381 { 01382 OMASSERT( receiverReferential->getComputingState() == ReferenceObjectHandle::suspended ) ; 01383 } 01384 } 01385 else if( currentEvent->eventId == SystemEventIdentifier::MaskResume ) 01386 { 01387 OMTRACEID( OMK_DEBUG_OMK_EVENT, "\"" << currentEvent->receiver <<"\" will resume execution" ) ; 01388 if( receiverReferential->getComputingState() == ReferenceObjectHandle::suspended ) 01389 { 01390 setComputingState( receiverReferential, ReferenceObjectHandle::running ); 01391 // treating event is useless because coming computes will do that 01392 noActivationNeededFor( receiverReferential ) ; 01393 _scheduler->schedule( static_cast< ReferenceObjectHandle * >( receiverObject->getObjectHandle() ) ); 01394 } 01395 } 01396 else if( currentEvent->eventId == SystemEventIdentifier::MaskDelete ) 01397 { 01398 processDeleteEventOf( receiverReferential ) ; 01399 } 01400 else if( currentEvent->eventId == SystemEventIdentifier::MaskRestart ) 01401 { 01402 OMTRACEID( OMK_DEBUG_OMK_EVENT, "\"" << currentEvent->receiver <<"\" will be restarted" ) ; 01403 if( receiverReferential->getComputingState() == ReferenceObjectHandle::stopped ) 01404 { 01405 setComputingState( receiverReferential, ReferenceObjectHandle::running ) ; 01406 // treating event is useless because coming computes will do that 01407 noActivationNeededFor( receiverReferential ); 01408 01409 receiverObject->init() ; 01410 // we know it is a referential 01411 _scheduler->schedule( receiverReferential ) ; 01412 } 01413 } 01414 else if( currentEvent->eventId == SystemEventIdentifier::MaskChangeObjectFrequency ) 01415 { 01416 ValuedEvent< Frequency > *realEvent = dynamic_cast< ValuedEvent< Frequency > * >( currentEvent ) ; 01417 OMASSERT( realEvent != 0 ) ; 01418 ObjectDescriptor *objectDescription = _simulationTree.findDescendantNamed( realEvent->receiver ) ; 01419 if( objectDescription != 0 ) 01420 { 01421 objectDescription->setFrequency( realEvent->value ) ; 01422 if( realEvent->value == computeAdequateFrequency ( realEvent->value ) ) 01423 { 01424 ReferenceObjectHandle *referenceObjectHandle = _referenceObjectsMap.getObjectOfIndex( realEvent->receiver ) ; 01425 if ( referenceObjectHandle != 0 ) 01426 { 01427 _scheduler->unschedule( referenceObjectHandle ) ; 01428 _scheduler->removeFromScheduable( referenceObjectHandle ) ; 01429 scheduleObject( _referenceObjectsMap.getObjectOfIndex( realEvent->receiver ) ) ; 01430 } 01431 } 01432 else 01433 { 01434 computeScheduling( false ) ; //false necessary because otherwise no change would happen 01435 scheduleControlledObjects() ; 01436 } 01437 } 01438 else 01439 { 01440 OMTRACEID( OMK_DEBUG_OMK_EXEC, 01441 "Controller received MaskChangeObjectFrequency for \"" << realEvent->receiver << "\" which is unknown " ) ; 01442 } 01443 } 01444 } 01445 list< Event * >::iterator toErase = i ; 01446 i++ ; 01447 Event *eventToDelete = *toErase ; 01448 myEventList.erase( toErase ) ; 01449 delete eventToDelete ; 01450 } 01451 } 01452
| void Controller::processStartEventOf | ( | ReferenceObjectHandle * | objectHandle | ) | [virtual] |
process MaskStart systemEvent for the object with handle
Reimplemented in OMK::DistributedController.
Definition at line 1288 of file OMKController.cpp.
References _scheduler, OMK::ReferenceObjectHandle::getComputingState(), OMK::ReferenceObjectHandle::initial, noActivationNeededFor(), OMK_DEBUG_OMK_EVENT, OMTRACEID, OMK::ReferenceObjectHandle::running, OMK::Scheduler::schedule(), and setComputingState().
Referenced by OMK::DistributedController::processStartEventOf(), and reactToControlledObjectsSystemEvents().
01288 { 01289 01290 if(objectHandle->getComputingState() == ReferenceObjectHandle::initial) 01291 { 01292 setComputingState (objectHandle, ReferenceObjectHandle::running ) ; 01293 noActivationNeededFor ( objectHandle ); 01294 OMTRACEID( OMK_DEBUG_OMK_EVENT, "Controller::processStartEventOf Init of \"" << objectHandle->getSimulatedObject().getName() << "\"" ) ; 01295 objectHandle->init() ; 01296 OMTRACEID( OMK_DEBUG_OMK_EVENT, "Controller::processStartEventOf end of init of \"" << objectHandle->getSimulatedObject().getName() << "\"" ) ; 01297 01298 _scheduler->schedule( objectHandle ); 01299 01300 } 01301 } 01302
| void Controller::processDeleteEventOf | ( | ReferenceObjectHandle * | objectHandle | ) | [virtual] |
process MaskDelete systemEvent for object obj
Definition at line 1321 of file OMKController.cpp.
References deleteObject(), OMK::ReferenceObjectHandle::destroyed, OMK::SimulatedObject::fireValuedSignal(), OMK::ReferenceObjectHandle::getComputingState(), OMK::ObjectDescriptor::getName(), OMK::SimulatedObject::getName(), OMK::SimulatedObject::getObjectDescriptor(), OMK::ObjectHandle::getSimulatedObject(), OMK::SystemEventIdentifier::MaskObjectDestroyed, OMK_DEBUG_OMK_EXEC, OMTRACEID, setComputingState(), and OMK::ReferenceObjectHandle::stopped.
Referenced by reactToControlledObjectsSystemEvents().
01321 { 01322 OMTRACEID( OMK_DEBUG_OMK_EXEC, " Controller::processDeleteEventOf \""<<objectHandle->getSimulatedObject().getName()<< "\"" ) ; 01323 if(objectHandle->getComputingState() == ReferenceObjectHandle::stopped) 01324 { 01325 fireValuedSignal( SystemEventIdentifier::MaskObjectDestroyed, objectHandle->getSimulatedObject().getObjectDescriptor().getName() ) ; 01326 setComputingState ( objectHandle, ReferenceObjectHandle::destroyed ); 01327 deleteObject(const_cast<ObjectDescriptor *>(&objectHandle->getSimulatedObject().getObjectDescriptor()) ); 01328 } 01329 } 01330
| void Controller::hasEventsToProcess | ( | ReferenceObjectHandle * | referenceObjectHandle | ) | [virtual] |
add the object handled by referenceObjectHandle to the list of objects having events to process and therefore that need activation (and therefore possibly activated at the current simulation step).
Behaviour is unspecified if the referenceObject is in running state
| referenceObjectHandle | objectHandle added |
Definition at line 1461 of file OMKController.cpp.
References _currentListOfObjectsNeedingActivation, _date, OMK::ReferenceObjectHandle::_isInObjectNeedingActivationList, OMK::SimulatedObject::_objectHandle, _objectsNeedingActivationList, _stepPeriod, OMK::SimulatedObject::getController(), OMK::SimulatedObject::getName(), OMK::ObjectHandle::getSimulatedObject(), hasEventsToProcess(), OMASSERT, OMK_DEBUG_OMK_EVENT, and OMTRACEID.
Referenced by hasEventsToProcess(), processEventsOfSuspendedObjects(), reactToControlledObjectsSystemEvents(), and OMK::ReferenceObjectHandle::receiveEvent().
01461 { 01462 // the object handle should be correct (because this member function is called by it) 01463 OMASSERT ( dynamic_cast<ReferenceObjectHandle *>(_objectHandle) != NULL ) ; 01464 01465 //the controller shouldn't try and schedule itself if it isn't controlled 01466 if (refObjet != _objectHandle) 01467 { 01468 01469 if (!refObjet->_isInObjectNeedingActivationList[ _currentListOfObjectsNeedingActivation ]) 01470 { 01471 OMTRACEID( OMK_DEBUG_OMK_EVENT, "Controller::hasEventsToProcess of \"" << refObjet->getSimulatedObject().getName() 01472 << "\" at date "<< _date + _stepPeriod ) ; 01473 _objectsNeedingActivationList[ _currentListOfObjectsNeedingActivation ]->push_back ( refObjet ); 01474 refObjet->_isInObjectNeedingActivationList[ _currentListOfObjectsNeedingActivation ] = true ; 01475 } 01476 else 01477 { 01478 OMTRACEID( OMK_DEBUG_OMK_EVENT, "Controller::hasEventsToProcess of \"" << refObjet->getSimulatedObject().getName() 01479 << "\" at date "<< _date + _stepPeriod << " not necessary " ) ; 01480 } 01481 } 01482 else if ( & getController() != this ) 01483 { 01484 getController().hasEventsToProcess( refObjet ) ; 01485 } 01486 } 01487
| void Controller::postponeEventProcessing | ( | ReferenceObjectHandle * | referenceObjectHandle | ) | [virtual] |
add the object described by referenceObjectHandle to the list of object with events to process at the next simulation step.
Definition at line 1489 of file OMKController.cpp.
References _listOfObjectsWithPostPonedEvents.
Referenced by OMK::ReferenceObjectHandle::processEvents().
01489 { 01490 _listOfObjectsWithPostPonedEvents.push_back(refObjet) ; 01491 } 01492
| void Controller::noActivationNeededFor | ( | ReferenceObjectHandle * | referenceObjectHandle | ) | [virtual] |
remove object designated by referenceObjectHandle from the list of object needing activation by the controler because they have events pending.
removal should occur if the reference object is becomming active
| referenceObjectHandle | : reference handle of object wich doesn't need acivation any more. |
Definition at line 1454 of file OMKController.cpp.
References _currentListOfObjectsNeedingActivation, OMK::ReferenceObjectHandle::_isInObjectNeedingActivationList, _objectsNeedingActivationList, and OMASSERT.
Referenced by processStartEventAfterMorphose(), processStartEventOf(), and reactToControlledObjectsSystemEvents().
01454 { 01455 _objectsNeedingActivationList[ _currentListOfObjectsNeedingActivation ]->remove( refObjet ); 01456 refObjet->_isInObjectNeedingActivationList[ _currentListOfObjectsNeedingActivation ] = false ; 01457 OMASSERT ( refObjet->_isInObjectNeedingActivationList[ 1 - _currentListOfObjectsNeedingActivation ] == false ); 01458 } 01459
| void Controller::addToPendingEvents | ( | Event * | ) | [virtual] |
add the event to the list of pending events.
Responsability for memory occupied by the event is transfered to the controller.
Definition at line 807 of file OMKController.cpp.
References _pendingEventsList, OMK_DEBUG_OMK_EXEC, OMTRACEID, and OMK::Event::receiver.
Referenced by OMK::SimulatedObject::sendEvent(), and OMK::SimulatedObject::sendValuedEvent().
00807 { 00808 if (event != NULL) 00809 { 00810 OMTRACEID( OMK_DEBUG_OMK_EXEC, "Controller::addToPendingEvents : Adding the following event to pending events of yet unexisting object: " << event->receiver << "\": "<< endl << *event ) ; 00811 #ifdef _OMK_MUTEX_ 00812 _mutexPendingDataStructures.protect() ; 00813 #endif 00814 map<Name, list <Event *> >::iterator pendingEventsMapIterator = _pendingEventsList.find( event->receiver ) ; 00815 if ( pendingEventsMapIterator != _pendingEventsList.end() ) 00816 { 00817 pendingEventsMapIterator->second.push_back(event) ; 00818 } 00819 else 00820 { 00821 _pendingEventsList.insert (pair<Name, list<Event *> > (event->receiver, list<Event *>(1,event) ) ) ; 00822 } 00823 #ifdef _OMK_MUTEX_ 00824 _mutexPendingDataStructures.unprotect() ; 00825 #endif 00826 } 00827 } 00828
| bool Controller::addToPendingRegistrations | ( | const EventIdentifier & | sig, | |
| const Name & | producer, | |||
| const EventIdentifier & | eventId, | |||
| const Name & | registrant | |||
| ) | [virtual] |
addToPendingRegistrations.
Add a registration request for an object not created yet
| sig | the signal to register for | |
| producer | the object producing the signal | |
| eventId | the event to send if producer fires signal | |
| registrant | the object registering for sig |
Definition at line 756 of file OMKController.cpp.
References _pendingRegistrationRequests.
Referenced by OMK::SimulatedObject::registerForSignalBy().
00759 { 00760 #ifdef _OMK_MUTEX_ 00761 _mutexPendingDataStructures.protect() ; 00762 #endif 00763 map<Name, SignalDispatcher *>::iterator i = _pendingRegistrationRequests.find (producer) ; 00764 if ( i == _pendingRegistrationRequests.end() ) 00765 { 00766 i = _pendingRegistrationRequests.insert ( pair <Name,SignalDispatcher *> (producer, 00767 new SignalDispatcher(*this) ) ).first ; 00768 } 00769 00770 i->second->registerForSignal( sig, registrant, eventId ) ; 00771 00772 #ifdef _OMK_MUTEX_ 00773 _mutexPendingDataStructures.unprotect() ; 00774 #endif 00775 00776 return true ; 00777 } 00778
| bool Controller::removeFromPendingRegistrations | ( | const EventIdentifier & | sig, | |
| const Name & | producer, | |||
| const Name & | registrant | |||
| ) | [virtual] |
removeFromPendingRegistrations.
Remove a pending registration
| sig | the signal to cancel registration for | |
| producer | the object producing the signal | |
| registrant | the object cancelling registration for sig |
Definition at line 780 of file OMKController.cpp.
References _pendingRegistrationRequests.
Referenced by OMK::SimulatedObject::cancelRegistrationForSignalBy().
00782 { 00783 bool result ; 00784 #ifdef _OMK_MUTEX_ 00785 _mutexPendingDataStructures.protect() ; 00786 #endif 00787 map<Name, SignalDispatcher *>::iterator i = _pendingRegistrationRequests.find (producer) ; 00788 if ( i == _pendingRegistrationRequests.end() ) 00789 { 00790 result = false ; 00791 } 00792 else 00793 { 00794 result = i->second->cancelRegistrationForSignal ( sig, registrant ) ; 00795 } 00796 00797 #ifdef _OMK_MUTEX_ 00798 _mutexPendingDataStructures.unprotect() ; 00799 #endif 00800 00801 return result ; 00802 } 00803
process events sent to the controller
Reimplemented from OMK::SimulatedObject.
Reimplemented in OMK::DistributedController.
Definition at line 1187 of file OMKController.cpp.
References _computeStatePointer, _forcedCompute, _simulationTree, changeObjectsFather(), computeScheduling(), OMK::Event::date, OMK::ReferenceObjectHandle::destroyed, OMK::Event::eventId, OMK::ObjectDescriptor::findDescendantNamed(), finish(), OMK::SimulatedObject::fireValuedSignal(), OMK::SimulatedObject::getName(), OMK::ObjectDescriptor::getName(), init(), OMK::ReferenceObjectHandle::initial, OMK::SystemEventIdentifier::MaskDelete, OMK::SystemEventIdentifier::MaskNewObject, OMK::SystemEventIdentifier::MaskObjectCreated, OMK::SystemEventIdentifier::MaskRecomputeScheduling, OMK::SystemEventIdentifier::MaskRestart, OMK::SystemEventIdentifier::MaskResume, OMK::SystemEventIdentifier::MaskStart, OMK::SystemEventIdentifier::MaskStop, OMK::SystemEventIdentifier::MaskSuspend, OMASSERT, OMK_DEBUG_OMK_EXEC, OMTRACEID, processNewObjectDeclaration(), OMK::ReferenceObjectHandle::running, scheduleControlledObjects(), OMK::ReferenceObjectHandle::stopped, and OMK::ReferenceObjectHandle::suspended.
Referenced by OMK::DistributedController::processEvent().
01187 { 01188 const EventIdentifier & eventId ( event->eventId ) ; 01189 if (eventId == SystemEventIdentifier::MaskRestart) 01190 { 01191 if (*_computeStatePointer == ReferenceObjectHandle::stopped) 01192 { 01193 *_computeStatePointer = ReferenceObjectHandle::initial ; 01194 //implementation very difficult, because the original simulation tree has been modified 01195 init() ; 01196 OMASSERT (false) ; 01197 } 01198 else 01199 { 01200 OMTRACEID( OMK_DEBUG_OMK_EXEC, "Controller::processEvent should be stopped before restarted" ); 01201 } 01202 } 01203 else if ( eventId == SystemEventIdentifier::MaskResume ) 01204 { 01205 *_computeStatePointer = ReferenceObjectHandle::running; 01206 } 01207 else if ( eventId == SystemEventIdentifier::MaskSuspend ) 01208 { 01209 if (*_computeStatePointer != ReferenceObjectHandle::suspended ) 01210 { 01211 // moving in suspended mode 01212 // stop computations, even forced 01213 _forcedCompute = false ; 01214 *_computeStatePointer = ReferenceObjectHandle::suspended ; 01215 } 01216 } 01217 else if ( eventId == SystemEventIdentifier::MaskStop ) 01218 { 01219 if (*_computeStatePointer != ReferenceObjectHandle::stopped ) 01220 { 01221 *_computeStatePointer=ReferenceObjectHandle::stopped ; 01222 01223 finish() ; 01224 } 01225 01226 } 01227 else if ( eventId == SystemEventIdentifier::MaskStart ) 01228 { 01229 01230 *_computeStatePointer=ReferenceObjectHandle::running; 01231 //this produces incorrect behaviour from the point of view of an object controlling the controller 01232 //if(_date==Controller::initialSimulationDate) advanceSimulatedDate(); 01233 01234 } 01235 else if (eventId == SystemEventIdentifier::MaskDelete ) 01236 { 01237 *_computeStatePointer=ReferenceObjectHandle::destroyed; 01238 } 01239 else if ( eventId == SystemEventIdentifier::MaskNewObject ) 01240 { 01241 CreateObjectEvent * creationEvent = dynamic_cast< CreateObjectEvent* >( event ) ; 01242 01243 OMASSERT (creationEvent != NULL ) ; 01244 01245 // add the described object in the simulation tree : this is a declaration 01246 ObjectDescriptor * objectDescriptor = _simulationTree.findDescendantNamed( creationEvent->value.getValue().first.getName() ); 01247 if ( objectDescriptor == NULL ) 01248 { 01249 ObjectDescriptor * newObjectDescriptor = new ObjectDescriptor(creationEvent->value.getValue().first) ; 01250 ObjectDescriptor * fathersDescription = _simulationTree.findDescendantNamed ( creationEvent->value.getValue().second ) ; 01251 if (fathersDescription == NULL) 01252 { 01253 fathersDescription = & _simulationTree ; 01254 OMTRACEID( OMK_DEBUG_OMK_EXEC, "Attached new object named \"" << newObjectDescriptor->getName() 01255 << "\" to \"" << getName() 01256 << "\" because object \""<<creationEvent->value.getValue().second<<"\" is unknown" ); 01257 } 01258 changeObjectsFather (newObjectDescriptor, fathersDescription) ; 01259 01260 //create the described object 01261 processNewObjectDeclaration ( *newObjectDescriptor, event->date ) ; 01262 01263 // notify other objects that an object has been created 01264 fireValuedSignal(SystemEventIdentifier::MaskObjectCreated,creationEvent->value.getValue().first.getName() ) ; 01265 } 01266 else 01267 { 01268 OMTRACEID( OMK_DEBUG_OMK_EXEC, "WARNING: an object of name \"" << creationEvent->value.getValue().first.getName() 01269 << "\" already exists" ) ; 01270 } 01271 } 01272 else if ( eventId == SystemEventIdentifier::MaskRecomputeScheduling) 01273 { 01274 computeScheduling( true ) ; 01275 01276 scheduleControlledObjects() ; 01277 } 01278 else 01279 { 01280 OMTRACEID( OMK_DEBUG_OMK_EXEC, "WARNING:Controller::ProcessEvent unable to process system event " ) ; 01281 } 01282 return true ; 01283 } 01284
| void Controller::processEventsOfSuspendedObjects | ( | ) | [virtual] |
call processEvent for suspended objects having received events
Definition at line 1494 of file OMKController.cpp.
References _currentListOfObjectsNeedingActivation, _date, OMK::ReferenceObjectHandle::_isInObjectNeedingActivationList, _listOfObjectsWithPostPonedEvents, _objectsNeedingActivationList, hasEventsToProcess(), OMK_DEBUG_OMK_EVENT, OMTRACEID, and OMK::ReferenceObjectHandle::processEvents().
Referenced by computeNextSimulationStep().
01494 { 01495 OMTRACEID( OMK_DEBUG_OMK_EVENT, "Controller::processEventsOfSuspendedObjects "<< _date ) ; 01496 while ( ! _objectsNeedingActivationList[ _currentListOfObjectsNeedingActivation ]->empty() ) { 01497 //using a iteration to be able to process ASAP events generated throught this phase 01498 int indiceFile = _currentListOfObjectsNeedingActivation ; 01499 _currentListOfObjectsNeedingActivation = 1 - _currentListOfObjectsNeedingActivation ; 01500 ReferenceObjectHandle * courant; 01501 list<ReferenceObjectHandle *>::iterator i; 01502 i=_objectsNeedingActivationList[indiceFile]->begin(); 01503 while(i!=_objectsNeedingActivationList[indiceFile]->end()) { 01504 list<ReferenceObjectHandle *>::iterator needsDelete; 01505 courant=(*i); 01506 courant->processEvents () ; 01507 courant->_isInObjectNeedingActivationList[indiceFile]= false ; 01508 needsDelete=i; 01509 i++; 01510 _objectsNeedingActivationList[indiceFile]->erase(needsDelete); 01511 } 01512 } 01513 list < ReferenceObjectHandle * >::iterator j = _listOfObjectsWithPostPonedEvents.begin() ; 01514 list < ReferenceObjectHandle * >::iterator toErase ; 01515 while ( j != _listOfObjectsWithPostPonedEvents.end() ) { 01516 hasEventsToProcess (*j) ; 01517 toErase = j ; 01518 j++ ; 01519 _listOfObjectsWithPostPonedEvents.erase( toErase ) ; 01520 } 01521 OMTRACEID( OMK_DEBUG_OMK_EVENT, "Controller::processEventsOfSuspendedObjects end "<< _date ) ; 01522 } 01523
| void Controller::broadcastEventsForSignal | ( | Event & | event, | |
| const EventIdentifier & | sigId | |||
| ) | [virtual] |
broadcast events corresponding to a fired signal
| sigId | the signal fired | |
| event | the event prototype to send to registered objects |
Reimplemented in OMK::DistributedController.
Definition at line 1546 of file OMKController.cpp.
References _controledObjectsSignalsDispatcher, OMK_DEBUG_OMK_EVENT, OMTRACEID, and OMK::SignalDispatcher::sendEventsForSignal().
Referenced by OMK::DistributedController::broadcastEventsForSignal(), OMK::SimulatedObject::fireSignal(), OMK::SimulatedObject::fireValuedSignal(), and OMK::ReferenceObjectHandle::sendEventsForSignal().
01546 { 01547 OMTRACEID( OMK_DEBUG_OMK_EVENT, "Controller::broadcastEventsForSignal \"" << sigId << "\"" ) ; 01548 _controledObjectsSignalsDispatcher.sendEventsForSignal( event , sigId ) ; 01549 } 01550
| bool Controller::receiveRegistrationForSignal | ( | const EventIdentifier & | sigId, | |
| const Name & | registrant, | |||
| const EventIdentifier & | eventId | |||
| ) | [virtual] |
register an object for a signal
| sigId | the signal to react to | |
| registrant | the simulated object registering to signal sigId | |
| eventId | the eventId to send to registrant when sigId is emitted |
Reimplemented in OMK::DistributedController.
Definition at line 1553 of file OMKController.cpp.
References _controledObjectsSignalsDispatcher, OMK_DEBUG_OMK_EVENT, OMTRACEID, and OMK::SignalDispatcher::registerForSignal().
Referenced by OMK::SimulatedObject::registerForSignal().
01555 { 01556 OMTRACEID( OMK_DEBUG_OMK_EVENT, "Controller::receiveRegistrationForSignal \"" << sig 01557 << "\" by \"" << registrant 01558 << "\" for \"" << eventId << "\"" ) ; 01559 return _controledObjectsSignalsDispatcher.registerForSignal(sig , registrant , eventId) ; 01560 } 01561
| bool Controller::receiveCancellationForSignal | ( | const EventIdentifier & | sigId, | |
| const Name & | registrant | |||
| ) | [virtual] |
cancel the registration of an object for a signal
| sigId | the signal for wich there is a cancellation | |
| registrant | the object cancelling registration |
Reimplemented in OMK::DistributedController.
Definition at line 1564 of file OMKController.cpp.
References _controledObjectsSignalsDispatcher, and OMK::SignalDispatcher::cancelRegistrationForSignal().
Referenced by OMK::SimulatedObject::cancelRegistrationForSignal().
01564 { 01565 return _controledObjectsSignalsDispatcher.cancelRegistrationForSignal (sigId , registrant) ; 01566 } 01567
| void Controller::setComputingState | ( | ReferenceObjectHandle * | , | |
| ReferenceObjectHandle::SimulatedObjectComputingState | ||||
| ) | const [protected, virtual] |
change the computing state of a reference object handle
Definition at line 1601 of file OMKController.cpp.
References OMK::ReferenceObjectHandle::_computingState.
Referenced by processDeleteEventOf(), processStartEventAfterMorphose(), OMK::DistributedController::processStartEventOf(), processStartEventOf(), and reactToControlledObjectsSystemEvents().
01602 { 01603 handle->_computingState = state ; 01604 } 01605
| void Controller::switchSystemEventList | ( | ) | [protected, virtual] |
switch buffer of List Of Objects Needing Activation
Definition at line 1159 of file OMKController.cpp.
References _currentWritableSystemEventsList.
Referenced by reactToControlledObjectsSystemEvents().
01159 { 01160 _currentWritableSystemEventsList = 1 - _currentWritableSystemEventsList ; 01161 } 01162
| void Controller::purgeMemoryFromOldEvents | ( | const Date & | dateOfOldestKept | ) | [protected, virtual] |
the method used to purge the data structures from all outdated kepts events.
For example, an event sent to an uncreated object would be purged if no object claims the event
Reimplemented in OMK::DistributedController.
Definition at line 561 of file OMKController.cpp.
References _deletedObjectHandles, _pendingEventsList, deleteObjectHandle(), OMK_DEBUG_OMK_EXEC, and OMTRACEID.
Referenced by compute(), OMK::DistributedController::purgeMemoryFromOldEvents(), and ~Controller().
00561 { 00562 // purge old events with no known receiver 00563 map<Name, list <Event *> >::iterator pendingEventsMapIterator = _pendingEventsList.begin() ; 00564 while ( pendingEventsMapIterator != _pendingEventsList.end() ) 00565 { 00566 list<Event *>::iterator eventListIterator = pendingEventsMapIterator->second.begin() ; 00567 while ( eventListIterator != pendingEventsMapIterator->second.end() ) 00568 { 00569 if ( (*eventListIterator)->date < dateOfOldestKept ) 00570 { 00571 delete *eventListIterator ; 00572 eventListIterator = pendingEventsMapIterator->second.erase ( eventListIterator ) ; 00573 } 00574 else 00575 { 00576 ++ eventListIterator ; 00577 } 00578 } 00579 if ( pendingEventsMapIterator->second.empty() ) 00580 { 00581 _pendingEventsList.erase ( pendingEventsMapIterator++ ) ; 00582 } 00583 else 00584 { 00585 pendingEventsMapIterator++ ; 00586 } 00587 } 00588 00589 00590 //purge deleted objects, objects handles and object descriptors 00591 bool disposableElements = !_deletedObjectHandles.empty() ; 00592 pair <Date, ObjectHandle *> examinedObjectHandle ; 00593 while ( disposableElements ) 00594 { 00595 examinedObjectHandle = _deletedObjectHandles.front() ; 00596 if ( examinedObjectHandle.first < dateOfOldestKept ) 00597 { 00598 OMTRACEID( OMK_DEBUG_OMK_EXEC, "Controller::purgeMemoryFromOldEvents: deleting \"" 00599 << examinedObjectHandle.second->getSimulatedObject().getName() << "\"" ) ; 00600 if ( &examinedObjectHandle.second->getSimulatedObject() != this ) 00601 deleteObjectHandle ( examinedObjectHandle.second ) ; 00602 _deletedObjectHandles.pop_front() ; 00603 disposableElements = !_deletedObjectHandles.empty() ; 00604 } 00605 else 00606 { 00607 disposableElements = false ; 00608 } 00609 } 00610 } 00611
| Date Controller::getPurgeDate | ( | ) | [protected, virtual] |
get the date of the oldest event not purged by purgeMemoryFromOldEvents
Reimplemented in OMK::PvmController.
Definition at line 555 of file OMKController.cpp.
References _date, and _stepPeriod.
Referenced by compute(), and OMK::PvmController::getPurgeDate().
00555 { 00556 return _date - _stepPeriod ; 00557 } 00558
| int Controller::getOutputHistorySize | ( | void | ) | [protected, virtual] |
get the minimum history length pertinant for this controller The value returned is the value of the environement variable MaskHISTORYLENGTH, or a default value calculated so that get(-4 dt) return an exact value if it has been produced
Reimplemented in OMK::PvmController.
Definition at line 1527 of file OMKController.cpp.
Referenced by createControlParameter(), createOutput(), createOutputAlias(), and OMK::PvmController::getOutputHistorySize().
01534 { 01535 result = _nbStepsByCycle*4+1 ; 01536 } 01537 else 01538 { 01539 result = atoi (environementValue) ; 01540 } 01541 return result ; 01542 } 01543
| ReferenceObjectHandle * Controller::createReferenceObjectHandle | ( | SimulatedObject & | obj | ) | [protected, virtual] |
create a reference object handler appropriate for this controller
| obj | the object to handle the reference object created |
Definition at line 1581 of file OMKController.cpp.
References _pendingRegistrationRequests, OMK::SimulatedObject::getName(), newOMKReferenceObjectHandle(), OMK_DEBUG_OMK_OBJ, and OMTRACEID.
Referenced by Controller(), createReferenceObject(), and OMK::DistributedController::processEvent().
01581 { 01582 /* no mutex protection needed, because this member function is only called by the controller during system event processing */ 01583 OMTRACEID( OMK_DEBUG_OMK_OBJ, "Controller::createReferenceObjectHandle" ) ; 01584 ReferenceObjectHandle * result ; 01585 map<Name, SignalDispatcher *>::iterator i = _pendingRegistrationRequests.find( obj.getName() ) ; 01586 if ( i == _pendingRegistrationRequests.end() ) 01587 { 01588 result = newOMKReferenceObjectHandle(obj,*this, new SignalDispatcher (*this) ); 01589 } 01590 else 01591 { 01592 result = newOMKReferenceObjectHandle(obj,*this, i->second) ; 01593 _pendingRegistrationRequests.erase ( i ) ; 01594 } 01595 OMTRACEID( OMK_DEBUG_OMK_OBJ, "Controller::createReferenceObjectHandle ended" ) ; 01596 return result ; 01597 } 01598
| ReferenceObjectHandle * Controller::newOMKReferenceObjectHandle | ( | SimulatedObject & | object, | |
| Controller & | controller, | |||
| SignalDispatcher * | signalDispatcher | |||
| ) | [protected, virtual] |
The controller is an abstract factory for reference object handles.
| obj | the object to handle | |
| controller | the controller of that object | |
| the | signal dispatche used by that object the reference object created |
Reimplemented in OMK::PvmController.
Definition at line 1572 of file OMKController.cpp.
Referenced by createReferenceObjectHandle().
01574 { 01575 return new ReferenceObjectHandle(object, controller, signalDispatcher) ; 01576 } 01577
| void Controller::deleteObjectHandle | ( | ObjectHandle * | objectHandle | ) | [protected, virtual] |
as the controller is an abstract factory for object handlers, is should also be an abstract destroyer
Definition at line 905 of file OMKController.cpp.
References OMK::ObjectDescriptor::_pointerToSimulatedObject, OMK::ObjectDescriptor::getName(), OMK::SimulatedObject::getObjectDescriptor(), OMK::ObjectHandle::getSimulatedObject(), OMK_DEBUG_OMK_EXEC, and OMTRACEID.
Referenced by OMK::DistributedController::processEvent(), and purgeMemoryFromOldEvents().
00905 { 00906 00907 ObjectDescriptor * objectDescriptor = const_cast<ObjectDescriptor *>(& objectHandle->getSimulatedObject().getObjectDescriptor() ) ; 00908 00909 delete objectHandle ; 00910 00911 //The object description is referenced by the simulation tree and the simulated object 00912 //delete the object description only if it isn't referenced by its simulated object 00913 if ( objectDescriptor->_pointerToSimulatedObject == NULL ) 00914 { 00915 OMTRACEID( OMK_DEBUG_OMK_EXEC, "Controller::deleteObject: deleting object descriptor of object \"" << objectDescriptor->getName() << "\"" ) ; 00916 OMTRACEID( "Deleting", "Controller::deleteObject: deleting object descriptor of object \"" << objectDescriptor->getName() << "\"" ) ; 00917 delete objectDescriptor; 00918 } 00919 } 00920
| bool Controller::setKernelObjectFactory | ( | KernelObjectAbstractFactory * | aFactory | ) | [static] |
set the kernelObjectfactory for the controller of this adressing space is only effective once for each adress space to be called before creation of the controller to be effective return : change effective
Definition at line 42 of file OMKController.cpp.
References kernelObjectFactory.
00043 { 00044 if ( kernelObjectFactory != NULL ) 00045 { 00046 kernelObjectFactory = aFactory ; 00047 return true ; 00048 } 00049 else 00050 { 00051 return false ; 00052 } 00053 }
| KernelObjectAbstractFactory * Controller::getKernelObjectFactory | ( | ) | [static] |
get the active kernelObjectFactory
Definition at line 55 of file OMKController.cpp.
References kernelObjectFactory.
Referenced by createControlParameter(), createInput(), createInputAlias(), createOutput(), createOutputAlias(), createSensitiveInput(), createSensitiveInputAlias(), createSensitiveNotifyingInput(), and createSensitiveNotifyingInputAlias().
00056 { 00057 if ( kernelObjectFactory == NULL ) 00058 { 00059 kernelObjectFactory = new KernelObjectClassicFactory () ; 00060 } 00061 00062 return kernelObjectFactory ; 00063 }
| Input< Type > * OMK::Controller::createInput | ( | const Name & | name, | |
| SimulatedObject & | owner, | |||
| bool | makeConnectable, | |||
| int | requestedPrecisionLevel | |||
| ) | [inline] |
create an input
| t | the type of input created | |
| name | the name of the input created | |
| owner | the owner of the input | |
| requestedPrecisionLevel | the polation level that willl be used by that input |
Definition at line 725 of file OMKController.h.
References getKernelObjectFactory().
00729 { 00730 return getKernelObjectFactory ()->template createInput<Type> (name,owner,makeConnectable,requestedPrecisionLevel); 00731 }
| SensitiveInput< Type > * OMK::Controller::createSensitiveInput | ( | const Name & | name, | |
| SimulatedObject & | owner, | |||
| bool | makeConnectable, | |||
| int | requestedPrecisionLevel | |||
| ) | [inline] |
create a sensitive input
| t | the type of sensitive input created | |
| name | the name of the sensitive input created | |
| owner | the owner of the sensitive input | |
| requestedPrecisionLevel | the polation level that willl be used by that input |
Definition at line 742 of file OMKController.h.
References getKernelObjectFactory().
00746 { 00747 return getKernelObjectFactory ()->template createSensitiveInput<Type>(name,owner,makeConnectable,requestedPrecisionLevel); 00748 }
| SensitiveNotifyingInput< Type > * OMK::Controller::createSensitiveNotifyingInput | ( | const Name & | name, | |
| SimulatedObject & | owner, | |||
| bool | makeConnectable, | |||
| int | requestedPrecisionLevel | |||
| ) | [inline] |
create a sensitive notifying input
| t | the type of sensitive notifying input created | |
| name | the name of the sensitive notifying input created | |
| owner | the owner of the sensitive notifying input | |
| requestedPrecisionLevel | the polation level that willl be used by that sensitive notifying input |
Definition at line 758 of file OMKController.h.
References getKernelObjectFactory().
00762 { 00763 return getKernelObjectFactory ()->template createSensitiveNotifyingInput<Type>(name,owner,makeConnectable,requestedPrecisionLevel); 00764 }
| Output< Type > * OMK::Controller::createOutput | ( | const Name & | name, | |
| SimulatedObject & | owner, | |||
| OMK::Type::PolatorNT * | polator | |||
| ) | [inline] |
create an ouput
| t | the type of the output created | |
| name | the name of the output created | |
| owner | the owner of the output | |
| polator | the associated polator |
Definition at line 775 of file OMKController.h.
References getKernelObjectFactory(), and getOutputHistorySize().
00778 { 00779 return getKernelObjectFactory ()->template createOutput<Type>(name,owner,getOutputHistorySize(),polator); 00780 }
| ControlParameter< Type > * OMK::Controller::createControlParameter | ( | const Name & | name, | |
| SimulatedObject & | owner, | |||
| OMK::Type::PolatorNT * | polator | |||
| ) | [inline] |
create a control parameter
| t | the type of the control parameter created | |
| name | the name of the control parameter created | |
| owner | the owner of the control parameter |
Definition at line 790 of file OMKController.h.
References getKernelObjectFactory(), and getOutputHistorySize().
00793 { 00794 return getKernelObjectFactory ()->template createControlParameter<Type>(name,owner,getOutputHistorySize(),polator); 00795 }
| InputAlias< Type > * OMK::Controller::createInputAlias | ( | const Name & | name, | |
| SimulatedObject & | owner, | |||
| AbstractInput< Type > * | input, | |||
| int | requestedPrecisionLevel | |||
| ) | [inline] |
create an input alias
| t | the type of input alias created | |
| name | the name of the input alias created | |
| owner | the owner of the input alias | |
| input | the aliased input | |
| requestedPrecisionLevel | the polation level that willl be used by that input alias |
Definition at line 807 of file OMKController.h.
References getKernelObjectFactory().
00811 { 00812 return getKernelObjectFactory ()->template createInputAlias<Type>(name,owner,input,requestedPrecisionLevel); 00813 }
| SensitiveInputAlias< Type > * OMK::Controller::createSensitiveInputAlias | ( | const Name & | name, | |
| SimulatedObject & | owner, | |||
| AbstractInput< Type > * | input, | |||
| int | requestedPrecisionLevel | |||
| ) | [inline] |
create a sensitive input alias
| t | the type of sensitive input alias created | |
| name | the name of the sensitive input alias created | |
| owner | the owner of the sensitive input alias | |
| input | the aliased input | |
| requestedPrecisionLevel | the polation level that willl be used by that sensitive input alias |
Definition at line 825 of file OMKController.h.
References getKernelObjectFactory().
00829 { 00830 return getKernelObjectFactory ()->template createSensitiveInputAlias<Type>(name,owner,input,requestedPrecisionLevel); 00831 }
| SensitiveNotifyingInputAlias< Type > * OMK::Controller::createSensitiveNotifyingInputAlias | ( | const Name & | name, | |
| SimulatedObject & | owner, | |||
| AbstractInput< Type > * | input, | |||
| int | requestedPrecisionLevel | |||
| ) | [inline] |
create a sensitive notifying input alias
| t | the type of sensitive notifying input alias created | |
| name | the name of the sensitive notifying input alias created | |
| owner | the owner of the sensitive notifying input alias | |
| input | the aliased input | |
| requestedPrecisionLevel | the polation level that willl be used by that sensitive notifying input alias |
Definition at line 843 of file OMKController.h.
References getKernelObjectFactory().
00847 { 00848 return getKernelObjectFactory ()->template createSensitiveNotifyingInputAlias<Type>(name,owner,input,requestedPrecisionLevel); 00849 }
| OutputAlias< Type > * OMK::Controller::createOutputAlias | ( | const Name & | name, | |
| SimulatedObject & | owner, | |||
| Output< Type > * | output, | |||
| OMK::Type::PolatorNT * | polator | |||
| ) | [inline] |
create an ouput alias
| t | the type of the output alias created | |
| name | the name of the output alias created | |
| owner | the owner of the output alias | |
| output | the aliased output | |
| polator | the associated polator |
Definition at line 861 of file OMKController.h.
References getKernelObjectFactory(), and getOutputHistorySize().
00865 { 00866 return getKernelObjectFactory ()->template createOutputAlias<Type>(name,owner,output,getOutputHistorySize(),polator); 00867 }
friend class InputNT [friend] |
friend class OMK::SimulatedObject [friend] |
Definition at line 265 of file OMKController.h.
Date Controller::initialSimulationDate [static] |
date at which simulation was initialised
Definition at line 168 of file OMKController.h.
Referenced by OMK::PvmController::advanceSimulatedDate(), Controller(), init(), OMK::SimulatedObject::insertInStream(), OMK::SimulatedObject::pack(), and OMK::ReferenceObjectHandle::ReferenceObjectHandle().
| std::vector<Name> OMK::Controller::_publicReferentielObjectsVector |
data structure containing references to the ReferenceObjectHandlers
Definition at line 315 of file OMKController.h.
Referenced by OMK::PvmController::computeNextSimulationStep(), computeScheduling(), OMK::DistributedController::createDuplicatedObject(), createReferenceObject(), OMK::DistributedController::dispatchEvent(), getPointerToDuplicatedObjectNamed(), OMK::DistributedController::getPointerToSimulatedObjectNamed(), getPointerToSimulatedObjectNamed(), getReferentielList(), init(), OMK::PvmController::parseSynchronisationMessage(), OMK::DistributedController::processEvent(), reactToControlledObjectsSystemEvents(), OMK::PvmController::removeObjectFromDataStructures(), OMK::PvmController::run(), scheduleControlledObjects(), and OMK::PvmController::sendInitialValuesToMirror().
ObjectDescriptor& OMK::Controller::_simulationTree [protected] |
the simulation tree this controller is root of This has to be a reference to a allready constructed simulation tree, because the root descriptor of that tree is used a parameter of the ancestors constructor wich keeps a reference of that descriptor.
Therefore, problems will arise if _simulationTree is a copy
Definition at line 320 of file OMKController.h.
Referenced by changeObjectsFather(), computeScheduling(), Controller(), destroyObject(), finish(), OMK::DistributedController::getObjectDescriptorOfObject(), getObjectDescriptorOfObject(), OMK::DistributedController::getPointerToSimulatedObjectNamed(), init(), OMK::DistributedController::processEvent(), processEvent(), OMK::PvmController::PvmController(), and reactToControlledObjectsSystemEvents().
unsigned long int OMK::Controller::_numberOfSimulatedSteps [protected] |
number of simulated steps up to now
Definition at line 323 of file OMKController.h.
Referenced by advanceSimulatedDate(), and computeNextSimulationStep().
Frequency OMK::Controller::_stepFrequency [protected] |
frequency of a simulation step
Definition at line 328 of file OMKController.h.
Referenced by computeAdequateFrequency(), computeScheduling(), and init().
int OMK::Controller::_cycleFrequency [protected] |
the frequency at wich activation patterns repeat themselves
Definition at line 331 of file OMKController.h.
Referenced by getCycleFrequency(), and setCycleFrequency().
int OMK::Controller::_cyclePeriod [protected] |
duration in simulated time of a simualtion cycle
Definition at line 334 of file OMKController.h.
Referenced by getCyclePeriod(), and setCycleFrequency().
int OMK::Controller::_nbStepsByCycle [protected] |
number of simulation step by cycle : we have _cycleFrequency * stepFrequency = _nbStepsByCycle
Definition at line 338 of file OMKController.h.
Referenced by computeScheduling(), and createScheduler().
int OMK::Controller::_stepPeriod [protected] |
_stepPeriod.
Duration in simulated time of a simulated step
Definition at line 343 of file OMKController.h.
Referenced by advanceSimulatedDate(), computeScheduling(), OMK::PvmController::getOutputHistorySize(), getPurgeDate(), hasEventsToProcess(), init(), OMK::PvmController::run(), ~Controller(), and OMK::DistributedController::~DistributedController().
Date OMK::Controller::_date [protected] |
simulated date
Definition at line 346 of file OMKController.h.
Referenced by OMK::PvmController::advanceSimulatedDate(), advanceSimulatedDate(), OMK::DistributedController::broadcastEventsForSignal(), computeScheduling(), OMK::DistributedController::deleteObject(), deleteObject(), OMK::DistributedController::getPointerToSimulatedObjectNamed(), getPurgeDate(), getSimulatedDate(), hasEventsToProcess(), OMK::PvmController::init(), init(), OMK::PvmController::makeSynchronisationMessage(), processEventsOfSuspendedObjects(), OMK::DistributedController::receiveCancellationForSignal(), OMK::DistributedController::receiveRegistrationForSignal(), OMK::PvmController::run(), OMK::PvmController::sendInitialValuesToMirror(), ~Controller(), and OMK::DistributedController::~DistributedController().
bool OMK::Controller::_showDateAndStepNumber [protected] |
flag indicating if the date and simulation step number are printed
Definition at line 349 of file OMKController.h.
Referenced by advanceSimulatedDate(), and showDateAndStepNumber().
ReferenceObjectHandle::SimulatedObjectComputingState* OMK::Controller::_computeStatePointer [protected] |
a pointer for easy access to th computationnel state of the controller : if the controller is controlling itsekg, this computationnal state should be : running
Definition at line 352 of file OMKController.h.
Referenced by Controller(), processEvent(), OMK::PvmController::PvmController(), run(), and runControllersStep().
signal dispatcher for objects interested in a signal whatever it's producer
Definition at line 439 of file OMKController.h.
Referenced by broadcastEventsForSignal(), OMK::DistributedController::processEvent(), receiveCancellationForSignal(), and receiveRegistrationForSignal().
bool OMK::Controller::_forcedCompute [protected] |
to enable computations even in suspendedState, when the controller is controlled
Definition at line 446 of file OMKController.h.
Referenced by processEvent(), and runControllersStep().
Scheduler* OMK::Controller::_scheduler [protected] |
the scheduler
Definition at line 449 of file OMKController.h.
Referenced by computeNextSimulationStep(), computeScheduling(), OMK::DistributedController::processEvent(), processStartEventAfterMorphose(), processStartEventOf(), reactToControlledObjectsSystemEvents(), and ~Controller().
std::list<ReferenceObjectHandle *>* OMK::Controller::_objectsNeedingActivationList[2] [protected] |
double buffered list of controlled object needing activation because they have received events Protect usage with _mutexForListEvt ;
Definition at line 454 of file OMKController.h.
Referenced by Controller(), hasEventsToProcess(), noActivationNeededFor(), processEventsOfSuspendedObjects(), removeObjectFromDataStructures(), and ~Controller().
1 - _currentListOfObjectsNeedingActivation is used to store new object needing activation
Definition at line 457 of file OMKController.h.
Referenced by Controller(), hasEventsToProcess(), noActivationNeededFor(), and processEventsOfSuspendedObjects().
std::list<Event *>* OMK::Controller::_systemEventsList[2] [protected] |
double buffered system event list
Definition at line 463 of file OMKController.h.
Referenced by actOnSystemEvent(), Controller(), reactToControlledObjectsSystemEvents(), and ~Controller().
unsigned int OMK::Controller::_currentWritableSystemEventsList [protected] |
_systemEventsList[_currentWritableSystemEventsList] is used to store system events sent to controlled objects
Definition at line 466 of file OMKController.h.
Referenced by actOnSystemEvent(), Controller(), reactToControlledObjectsSystemEvents(), and switchSystemEventList().
std::list<ReferenceObjectHandle * > OMK::Controller::_listOfObjectsWithPostPonedEvents [protected] |
list of objects with postponed events
Definition at line 469 of file OMKController.h.
Referenced by postponeEventProcessing(), and processEventsOfSuspendedObjects().
std::map<Name, std::list<Event *> > OMK::Controller::_pendingEventsList [protected] |
list of pending events (events sent to unknown objects)
Definition at line 476 of file OMKController.h.
Referenced by addToPendingEvents(), OMK::DistributedController::processNewObjectDeclaration(), purgeMemoryFromOldEvents(), and sendInitialEventsTo().
std::map<Name, SignalDispatcher *> OMK::Controller::_pendingRegistrationRequests [protected] |
map of pending registration requests
Definition at line 484 of file OMKController.h.
Referenced by addToPendingRegistrations(), createReferenceObjectHandle(), removeFromPendingRegistrations(), and ~Controller().
std::list<std::pair <Date, ObjectHandle *> > OMK::Controller::_deletedObjectHandles [protected] |
the list of recently deleted object handles.
Deleted objects pass through purge because
Definition at line 496 of file OMKController.h.
Referenced by deleteObject(), getObjectDescriptorOfObject(), getPointerToSimulatedObjectNamed(), purgeMemoryFromOldEvents(), and OMK::PvmController::sendInitialValuesToMirror().
KernelObjectAbstractFactory * Controller::kernelObjectFactory [static, private] |
the kernel object factory used to create attribute of controlled object
Definition at line 658 of file OMKController.h.
Referenced by getKernelObjectFactory(), and setKernelObjectFactory().

| Documentation generated on Mon Jun 9 11:46:02 2008 |
Generated with doxygen by Dimitri van Heesch , 1997-2007 |