#include <OMKStaticHumano.h>
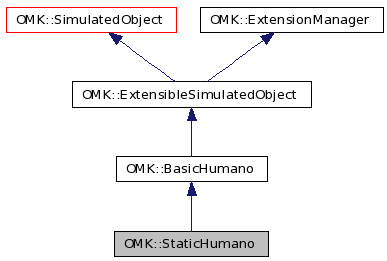
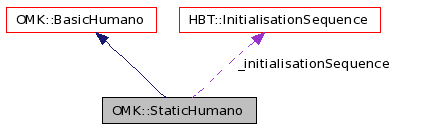
Inheritance diagram for OMK::StaticHumano:
Protected Member Functions | |
| virtual HBT::InitialisationSequence * | getInitialiseSequence () |
| This part of the compute methods computes the associated data. | |
Protected Attributes | |
| HBT::InitialisationSequence | _initialisationSequence |
Private Member Functions | |
| DECLARE_OBJECT_FACTORY (StaticHumano) | |
Definition at line 13 of file OMKStaticHumano.h.
| OMK::StaticHumano::DECLARE_OBJECT_FACTORY | ( | StaticHumano | ) | [private] |
| HBT::InitialisationSequence * StaticHumano::getInitialiseSequence | ( | ) | [protected, virtual] |
This part of the compute methods computes the associated data.
Implements OMK::BasicHumano.
Definition at line 27 of file OMKStaticHumano.cpp.
References _initialisationSequence, OMK::BasicHumano::_position, OMK::Vis::convert(), HBT::InitialisationSequence::generalScale, OMK::ParametersAccessor::get(), OMK::SimulatedObject::getConfigurationParameters(), OMK::SimulatedObject::getName(), OMK::Name::getString(), HBT::InitialisationSequence::humanName, HBT::InitialisationSequence::meshFile, HBT::InitialisationSequence::rootPos, HBT::InitialisationSequence::rootQuat, and HBT::InitialisationSequence::useShadows.
00028 { 00029 // create the minimal HBT::InitialisationSequence 00030 const ConfigurationParameterDescriptor* node = getConfigurationParameters(); 00031 bool ok = ( node != 0 ) ; 00032 00033 std::string meshFile ; 00034 ok = ok && ParametersAccessor::get( node, "Mesh", meshFile, this ) ; 00035 00036 bool useShadows = true ; 00037 ParametersAccessor::get( node, "UseShadows", useShadows ) ; 00038 00039 if( ok ) 00040 { // Parameter are ok => set the InitialisationSequence 00041 _initialisationSequence.humanName = getName().getString() ; 00042 _initialisationSequence.meshFile = meshFile ; 00043 _initialisationSequence.useShadows = useShadows ; 00044 _initialisationSequence.generalScale = Ogre::Vector3( 1.0f/_position.get().getScale().X() ); 00045 _initialisationSequence.rootQuat = convert( _position.get().getQuaternionRotate() ) ; 00046 _initialisationSequence.rootPos = convert( _position.get().getTranslate() ) ; 00047 } 00048 return ok ? &_initialisationSequence : 0 ; 00049 }

| Documentation generated on Mon Jun 9 11:46:04 2008 |
Generated with doxygen by Dimitri van Heesch , 1997-2007 |