#include <HBTDataTypes.h>
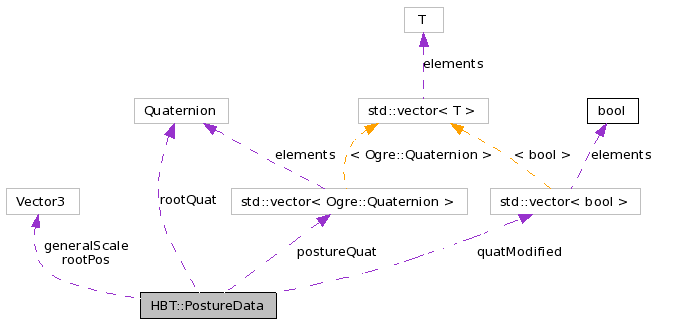
Collaboration diagram for HBT::PostureData:
Public Member Functions | |
| PostureData () | |
| Constructor. | |
| PostureData (const PostureData &posture) | |
| Copy constructor. | |
| PostureData & | operator= (const PostureData &posture) |
| Copy operator. | |
Public Attributes | |
| Ogre::Vector3 | rootPos |
| position du root de la posture (X, Y, Z) | |
| Ogre::Quaternion | rootQuat |
| orientation du root de la posture (X, Y, Z, W) | |
| Ogre::Vector3 | generalScale |
| scale general du l'humanoide | |
| std::vector< Ogre::Quaternion > | postureQuat |
| vecteur des quaternions (X, Y, Z, W) definissants la posture. Attention: les quaternions sont dans l'ordre du mesh Ogre, si le mesh est different entre le calcul des quaternion et leur utilisation, cela risque de poser problème... | |
| std::vector< bool > | quatModified |
| vecteur de booleens indiquant si le bone à l'indice donné doit être mis à jour ou non | |
Protected Member Functions | |
| void | _copy (const PostureData &posture) |
| Protected copy function. | |
Definition at line 23 of file HBTDataTypes.h.
| HBT::PostureData::PostureData | ( | ) | [inline] |
| HBT::PostureData::PostureData | ( | const PostureData & | posture | ) | [inline] |
| PostureData& HBT::PostureData::operator= | ( | const PostureData & | posture | ) | [inline] |
Copy operator.
Definition at line 36 of file HBTDataTypes.h.
00036 { _copy( posture ) ; return *this ; }
| void HBT::PostureData::_copy | ( | const PostureData & | posture | ) | [inline, protected] |
Protected copy function.
Definition at line 75 of file HBTDataTypes.h.
References generalScale, postureQuat, quatModified, rootPos, and rootQuat.
00076 { 00077 if( this != &posture ) 00078 { 00079 rootPos = posture.rootPos ; 00080 rootQuat = posture.rootQuat ; 00081 generalScale = posture.generalScale ; 00082 postureQuat = posture.postureQuat ; 00083 quatModified = posture.quatModified ; 00084 } 00085 }
| Ogre::Vector3 HBT::PostureData::rootPos |
position du root de la posture (X, Y, Z)
Definition at line 25 of file HBTDataTypes.h.
Referenced by _copy(), OMK::MKMHumano::computeParameters(), operator<<(), operator>>(), HBT::Player::read(), HBT::AvatarMesh::update(), and HBT::Recorder::write().
| Ogre::Quaternion HBT::PostureData::rootQuat |
orientation du root de la posture (X, Y, Z, W)
Definition at line 26 of file HBTDataTypes.h.
Referenced by _copy(), OMK::MKMHumano::computeParameters(), operator<<(), operator>>(), HBT::Player::read(), HBT::AvatarMesh::update(), and HBT::Recorder::write().
| Ogre::Vector3 HBT::PostureData::generalScale |
scale general du l'humanoide
Definition at line 27 of file HBTDataTypes.h.
Referenced by _copy(), operator<<(), operator>>(), HBT::Player::read(), HBT::AvatarMesh::update(), and HBT::Recorder::write().
| std::vector<Ogre::Quaternion> HBT::PostureData::postureQuat |
vecteur des quaternions (X, Y, Z, W) definissants la posture. Attention: les quaternions sont dans l'ordre du mesh Ogre, si le mesh est different entre le calcul des quaternion et leur utilisation, cela risque de poser problème...
Definition at line 28 of file HBTDataTypes.h.
Referenced by _copy(), operator<<(), operator>>(), HBT::Player::read(), HBT::AvatarMesh::update(), and HBT::Recorder::write().
| std::vector<bool> HBT::PostureData::quatModified |
vecteur de booleens indiquant si le bone à l'indice donné doit être mis à jour ou non
Definition at line 29 of file HBTDataTypes.h.
Referenced by _copy(), operator<<(), operator>>(), HBT::Player::read(), HBT::AvatarMesh::update(), and HBT::Recorder::write().

| Documentation generated on Mon Jun 9 11:46:00 2008 |
Generated with doxygen by Dimitri van Heesch , 1997-2007 |