#include <OMKVisualObject.h>
Inheritance diagram for OMK::Vis::VisualObject:
Public Member Functions | |
| void | update () |
| The update to compute the new picture. | |
| const VisBase & | getVis () const |
| returns a const reference to the associated visualisation | |
| VisBase & | touchVis () const |
| returns a reference to the associated visualisation | |
| const Name & | getId () const |
| Returns the id (name) of the visual object. | |
| const Type::Transform & | getTransform () const |
| Returns a reference to the visual object transform. | |
| void | addAnimator (OMK::Vis::Animator *animator) |
| Add an animator to the visual object. | |
| void | deleteAnimator (const Name &id) |
| Delete an animator of the visual object. | |
| OMK::Vis::Animator * | getAnimator (const Name &id) const |
| Returns the animator of the visual object. | |
Protected Types | |
| typedef std::map< Name, OMK::Vis::Animator * > | AnimatorsMap |
| Animators list. | |
Protected Member Functions | |
| virtual void | visualise ()=0 |
| The visualisation method. | |
Protected Attributes | |
| AnimatorsMap | _animators |
Private Member Functions | |
| void | readConfigurationParameters (const ConfigurationParameterDescriptor *node) |
| read the configuration parameters : geometryFileName | |
Private Attributes | |
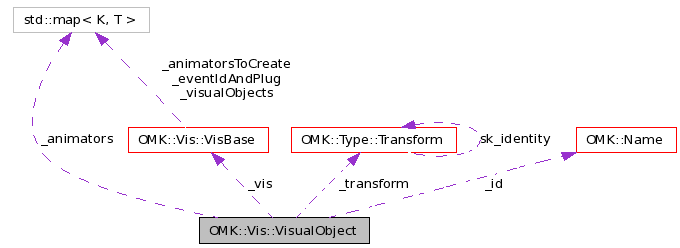
| VisBase & | _vis |
| reference to the associated visualisation | |
| Name | _id |
| The id (name). | |
| Type::Transform | _transform |
| transformation to position/orient the visual object | |
Position [[0 1 2]]
Translate [0 1.5 2] Rotate [0 0.3 0.3] Scale [0.5 0.5 0.5]
Definition at line 58 of file OMKVisualObject.h.
typedef std::map< Name, OMK::Vis::Animator* > OMK::Vis::VisualObject::AnimatorsMap [protected] |
Animators list.
The vector which stores the animators of the visual object
Definition at line 113 of file OMKVisualObject.h.
| VisualObject::VisualObject | ( | VisBase & | vis, | |
| const Name & | id, | |||
| const ConfigurationParameterDescriptor * | node | |||
| ) |
Constructor of OMK::Vis::VisualObject.
Definition at line 42 of file OMKVisualObject.cpp.
References OMK::Vis::debugMsg(), OMK_DEBUG_VIS_EXEC, OMTRACEID, and readConfigurationParameters().
00042 : 00043 _vis( vis ), 00044 _id( id ) 00045 { 00046 OMTRACEID( OMK_DEBUG_VIS_EXEC, "Construction of " << debugMsg( this ) ); 00047 readConfigurationParameters( node ) ; 00048 }
| VisualObject::~VisualObject | ( | ) | [virtual] |
Destructor of OMK::Vis::VisualObject.
Destroy the animators.
Definition at line 53 of file OMKVisualObject.cpp.
References _animators, OMK::Vis::debugMsg(), OMK_DEBUG_VIS_EXEC, and OMTRACEID.
00054 { 00055 OMTRACEID( OMK_DEBUG_VIS_EXEC, "Destruction of " << debugMsg( this ) ); 00056 for( AnimatorsMap::iterator a( _animators.begin() ) ; 00057 a != _animators.end() ; 00058 a++ ) 00059 { 00060 delete a->second ; 00061 } 00062 _animators.clear(); 00063 }
| VisualObject::VisualObject | ( | VisBase & | vis, | |
| const Name & | id, | |||
| const ConfigurationParameterDescriptor * | node | |||
| ) |
Constructor of OMK::Vis::VisualObject.
Definition at line 42 of file OMKVisualObject.cpp.
References OMK::Vis::debugMsg(), OMK_DEBUG_VIS_EXEC, OMTRACEID, and readConfigurationParameters().
00042 : 00043 _vis( vis ), 00044 _id( id ) 00045 { 00046 OMTRACEID( OMK_DEBUG_VIS_EXEC, "Construction of " << debugMsg( this ) ); 00047 readConfigurationParameters( node ) ; 00048 }
| VisualObject::~VisualObject | ( | ) | [virtual] |
Destructor of OMK::Vis::VisualObject.
Destroy the animators.
Definition at line 53 of file OMKVisualObject.cpp.
References _animators, OMK::Vis::debugMsg(), OMK_DEBUG_VIS_EXEC, and OMTRACEID.
00054 { 00055 OMTRACEID( OMK_DEBUG_VIS_EXEC, "Destruction of " << debugMsg( this ) ); 00056 for( AnimatorsMap::iterator a( _animators.begin() ) ; 00057 a != _animators.end() ; 00058 a++ ) 00059 { 00060 delete a->second ; 00061 } 00062 _animators.clear(); 00063 }
| void VisualObject::update | ( | ) |
The update to compute the new picture.
Ask to the animator to update the visual object, then calls visualize method. The method
Definition at line 68 of file OMKVisualObject.cpp.
References _animators, and visualise().
00069 { 00070 // Call each animator 00071 for( AnimatorsMap::iterator a( _animators.begin() ) ; 00072 a != _animators.end() ; 00073 ++a ) 00074 { 00075 a->second->processVis() ; 00076 } 00077 00078 visualise() ; 00079 }
| const VisBase & OMK::Vis::VisualObject::getVis | ( | ) | const [inline] |
returns a const reference to the associated visualisation
Definition at line 205 of file OMKVisualObject.h.
References _vis.
00207 { 00208 return _vis ;
| VisBase & OMK::Vis::VisualObject::touchVis | ( | ) | const [inline] |
returns a reference to the associated visualisation
Definition at line 214 of file OMKVisualObject.h.
References _vis.
Referenced by OMK::Vis::Animator::Animator(), and OMK::Vis::AnimatorT< T >::AnimatorT().
00216 { 00217 return _vis ;
| const Name & OMK::Vis::VisualObject::getId | ( | ) | const [inline] |
Returns the id (name) of the visual object.
Definition at line 223 of file OMKVisualObject.h.
References _id.
Referenced by OMK::Vis::VisBase::addNewVisualObject(), OMK::Vis::debugMsg(), and OMK::Vis::VisBase::processAddVisualObjectEvent().
00225 { 00226 return _id ;
| const Type::Transform & OMK::Vis::VisualObject::getTransform | ( | ) | const [inline] |
Returns a reference to the visual object transform.
Definition at line 232 of file OMKVisualObject.h.
References _transform.
Referenced by OMK::Vis::OgreObject::OgreObject().
00234 { 00235 return _transform ;
| void VisualObject::addAnimator | ( | OMK::Vis::Animator * | animator | ) |
Add an animator to the visual object.
Definition at line 147 of file OMKVisualObject.cpp.
References _animators, and OMK::Vis::Animator::getId().
00148 { 00149 _animators[ animator->getId() ] = animator ; 00150 }
| void VisualObject::deleteAnimator | ( | const Name & | id | ) |
Delete an animator of the visual object.
| [in] | id,the | id of tha animator to delete. |
Definition at line 155 of file OMKVisualObject.cpp.
References _animators, OMASSERTM, OMK_DEBUG_VIS_EXEC, and OMTRACEID.
00156 { 00157 AnimatorsMap::iterator i = _animators.find( id ) ; 00158 OMASSERTM( i != _animators.end(), "The animator named \"" << id << "\" is not present !" ) ; 00159 // delete the animator 00160 delete i->second ; 00161 _animators.erase( i ) ; 00162 OMTRACEID( OMK_DEBUG_VIS_EXEC, ">>> :-) The animator named \"" << id << "\" is deleted" ) ; 00163 }
Returns the animator of the visual object.
| [in] | id,the | id of tha animator to find. |
Definition at line 138 of file OMKVisualObject.cpp.
References _animators.
00139 { 00140 AnimatorsMap::const_iterator i = _animators.find( id ) ; 00141 return i != _animators.end() ? i->second : 0 ; 00142 }
| virtual void OMK::Vis::VisualObject::visualise | ( | ) | [protected, pure virtual] |
The visualisation method.
This method is called by visualisation to compute the new picture. This method is overwritten by sons to create the visualisation.
Implemented in OMK::Vis::OgreObject, and OMK::Vis::AvatarVisualObject.
Referenced by update().
| void VisualObject::readConfigurationParameters | ( | const ConfigurationParameterDescriptor * | node | ) | [private] |
read the configuration parameters : geometryFileName
Definition at line 84 of file OMKVisualObject.cpp.
References _transform, OMK::Vis::debugMsg(), OMK::ParametersAccessor::get(), OMK_DEBUG_VIS, OMTRACEID, OMK::Type::Transform::setRotate(), OMK::Type::Transform::setScale(), OMK::Type::Transform::setTranslate(), and OMK::Type::Transform::setUniformScale().
Referenced by VisualObject().
00085 { 00086 // Retrieve the transform parameters 00087 // First try to load a transform 00088 00089 if( !ParametersAccessor::get( node, "Position", _transform ) ) 00090 { 00091 std::vector< float > v ; 00092 if( ParametersAccessor::get( node, "Translate", v ) 00093 && v.size() == 3 ) 00094 { 00095 _transform.setTranslate( Vector3f( v[0], v[1], v[2] ) ) ; 00096 } 00097 else 00098 { 00099 OMTRACEID( OMK_DEBUG_VIS, "Warning for " << debugMsg( this ) << std::endl 00100 << ">>> :-| no translate provided, will use 0 0 0 by default" ) ; 00101 } 00102 v.clear() ; 00103 if( ParametersAccessor::get( node, "Rotate", v ) 00104 && v.size() == 3 ) 00105 { 00106 Matrix3f matrix ; 00107 matrix.FromEulerAnglesXYZ( v[0], v[1], v[2] ) ; 00108 _transform.setRotate( matrix ) ; 00109 } 00110 else 00111 { 00112 OMTRACEID( OMK_DEBUG_VIS, "Warning for " << debugMsg( this ) << std::endl 00113 << ">>> :-| no rotate provided, will use 0 0 0 by default" ) ; 00114 } 00115 v.clear() ; 00116 float scale = 1.0f ; 00117 if( ParametersAccessor::get( node, "Scale", v ) 00118 && v.size() == 3 ) 00119 { 00120 _transform.setScale( Vector3f( v[0], v[1], v[2] ) ) ; 00121 } 00122 if( ParametersAccessor::get( node, "Scale", scale ) ) 00123 { 00124 _transform.setUniformScale( scale ) ; 00125 } 00126 else 00127 { 00128 OMTRACEID( OMK_DEBUG_VIS, "Warning for " << debugMsg( this ) << std::endl 00129 << ">>> :-| no scale provided, will use 0 0 0 by default" ) ; 00130 } 00131 } 00132 00133 }
AnimatorsMap OMK::Vis::VisualObject::_animators [protected] |
Definition at line 114 of file OMKVisualObject.h.
Referenced by addAnimator(), deleteAnimator(), getAnimator(), update(), OMK::Vis::OgreObject::~OgreObject(), and ~VisualObject().
VisBase& OMK::Vis::VisualObject::_vis [private] |
reference to the associated visualisation
Definition at line 123 of file OMKVisualObject.h.
Referenced by getVis(), and touchVis().
Name OMK::Vis::VisualObject::_id [private] |
transformation to position/orient the visual object
Definition at line 129 of file OMKVisualObject.h.
Referenced by getTransform(), and readConfigurationParameters().

| Documentation generated on Mon Jun 9 11:46:05 2008 |
Generated with doxygen by Dimitri van Heesch , 1997-2007 |