#include <OMKAddAnimatorPrm.h>
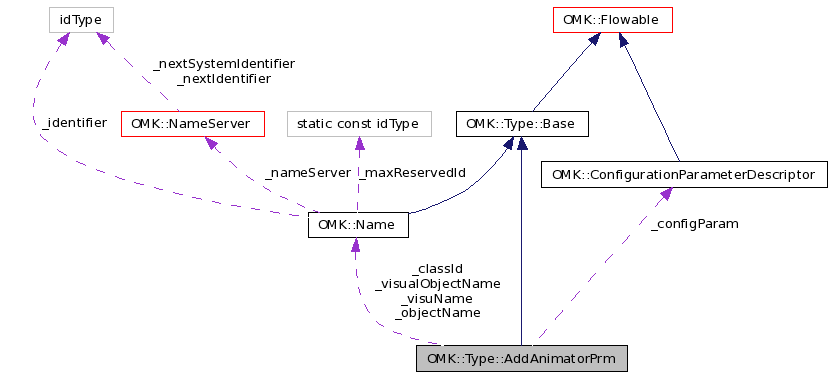
Inheritance diagram for OMK::Type::AddAnimatorPrm:
Reset and loaders | |
| virtual void | resetDefaultValues () |
| Reset the default values of AddAnimatorPrm. | |
| virtual bool | loadParameters (const ConfigurationParameterDescriptor *node, const std::string &prefix="", SimulatedObject *p=0) |
| Configuration parameters loader of AddAnimatorPrm. | |
| bool | innerParametersLoader (const ConfigurationParameterDescriptor *node, const std::string &prefix="", SimulatedObject *p=0) |
| Protected loader, does not reset the default values. | |
Public Member Functions | |
Accessors to attributes. | |
| void | setObjectName (const Name &objectName) |
| Set the objectName value of AddVisualObjectPrm. | |
| const Name & | getObjectName () const |
| Return the objectName value of AddVisualObjectPrm. | |
| void | setClassId (const Name &classId) |
| Set the classId value of AddAnimatorPrm. | |
| const Name & | getClassId () const |
| Return the classId value of AddAnimatorPrm. | |
| void | setVisualObjectName (const Name &visualObjectName) |
| Set the visualObjectName value of AddAnimatorPrm. | |
| const Name & | getVisualObjectName () const |
| Return the visualObjectName value of AddAnimatorPrm. | |
| void | setVisuName (const Name &VisuName) |
| Set the VisuName value of AddAnimatorPrm. | |
| const Name & | getVisuName () const |
| Return the VisuName value of AddAnimatorPrm. | |
| void | setConfigParam (const ConfigurationParameterDescriptor *configParam) |
| Set the configParam value of AddAnimatorPrm. | |
| const ConfigurationParameterDescriptor * | getConfigParam () const |
| Return the configParam value of AddAnimatorPrm. | |
Operators. | |
| bool | operator== (const AddAnimatorPrm &ref) const |
| Comparison operator for equality. | |
| bool | operator!= (const AddAnimatorPrm &ref) const |
| Comparison operator for difference. | |
| AddAnimatorPrm & | operator= (const AddAnimatorPrm &ref) |
| Copy operator. | |
Packable, Flowable, OMKType interfaces. | |
| virtual void | insertInStream (std::ostream &=std::cout) const |
| Insert datas in an output stream. | |
| virtual void | extract (std::istream &=std::cin) |
| Extract datas from an input stream. | |
| virtual void | pack (OutgoingSynchronisationMessage &out) const |
| Pack datas in the message. | |
| virtual void | unpack (IncomingSynchronisationMessage &in) |
| Unpack datas from the message. | |
| virtual PolatorNT * | createPolator () |
| Default polator creator. | |
Protected Member Functions | |
| void | _copy (const AddAnimatorPrm &ref) |
| Copy methods call by constructor and operator. | |
Protected Attributes | |
Datas | |
| Name | _objectName |
| This member holds the ObjectName value of AddVisualObjectPrm. | |
| Name | _classId |
| This member holds the Class value of AddAnimatorPrm. | |
| Name | _visualObjectName |
| This member holds the VisualObjectName value of AddAnimatorPrm. | |
| Name | _visuName |
| This member holds the VisuName value of AddAnimatorPrm. | |
| const ConfigurationParameterDescriptor * | _configParam |
| This member holds the configParam value of AddAnimatorPrm. | |
myObject
{
Class ObjectWhichUsesAddAnimatorPrm
Scheduling
{
Frequency 75
Process processA
}
UserParams
{
// Optional parameters
firstVisualObjectName <Name>
firstVisuName <Name>
firstConfigParam <ConfigurationParameterDescriptor>
// Needed parameters
firstClass <Name>
secondClass <Name>
//... other object parameters
}
}
class ObjectWhichUsesAddAnimatorPrm : public SimulatedObject { //... protected: AddAnimatorPrm _addAnimatorPrm1 ; AddAnimatorPrm _addAnimatorPrm2 ; } ;
void ObjectWhichUsesAddAnimatorPrm::init() { //... _addAnimatorPrm1.loadParameters( getConfigurationParameters(), "first" ) ; _addAnimatorPrm2.loadParameters( getConfigurationParameters(), "second" ) ; }
myObject
{
Class ObjectWhichUsesAddAnimatorPrm
Scheduling
{
Frequency 75
Process processA
}
UserParams
{
firstAddAnimatorPrm
{
// Optional parameters
VisualObjectName <Name>
VisuName <Name>
ConfigParam <ConfigurationParameterDescriptor>
// Needed parameters
Class <Name>
}
secondAddAnimatorPrm
{
// Optional parameters
// Needed parameters
Class <Name>
}
//... other object parameters
}
}
void ObjectWhichUsesAddAnimatorPrm::init() { //... const ConfigurationParameterDescriptor* node = getConfigurationParameters(); _addAnimatorPrm1.loadParameters( node ? node->getSubDescriptorByName( "firstAddAnimatorPrm" ) : 0, "", this ) ; _addAnimatorPrm2.loadParameters( node ? node->getSubDescriptorByName( "secondAddAnimatorPrm" ) : 0, "", this ) ; }
Definition at line 159 of file OMKAddAnimatorPrm.h.
| AddAnimatorPrm::AddAnimatorPrm | ( | ) |
Default constructor ofAddAnimatorPrm.
Definition at line 35 of file OMKAddAnimatorPrm.cpp.
00036 : Base(), 00037 _objectName() , 00038 _classId(), 00039 _visualObjectName(), 00040 _visuName(), 00041 _configParam( 0 ) 00042 { 00043 }
| AddAnimatorPrm::AddAnimatorPrm | ( | const AddAnimatorPrm & | ref | ) |
Copy constructor of AddAnimatorPrm.
Definition at line 47 of file OMKAddAnimatorPrm.cpp.
References _copy().
00048 : Base(), 00049 _configParam( 0 ) 00050 { 00051 _copy( ref ) ; 00052 }
| AddAnimatorPrm::AddAnimatorPrm | ( | const Name & | objectName, | |
| const Name & | classId, | |||
| const Name & | visualObjectName, | |||
| const Name & | VisuName, | |||
| const ConfigurationParameterDescriptor * | configParam | |||
| ) |
Constructor of AddAnimatorPrm with all the parameters.
Definition at line 56 of file OMKAddAnimatorPrm.cpp.
00061 : Base(), 00062 _objectName( objectName ) , 00063 _classId( classId ) , 00064 _visualObjectName( visualObjectName ) , 00065 _visuName( VisuName ) , 00066 _configParam( configParam ? configParam->clone() : 0 ) 00067 { 00068 }
| AddAnimatorPrm::~AddAnimatorPrm | ( | ) | [virtual] |
Destructor of AddAnimatorPrm.
Definition at line 72 of file OMKAddAnimatorPrm.cpp.
References _configParam.
00073 { 00074 delete _configParam ; 00075 }
| AddAnimatorPrm::AddAnimatorPrm | ( | ) |
Default constructor ofAddAnimatorPrm.
Definition at line 35 of file OMKAddAnimatorPrm.cpp.
00036 : Base(), 00037 _objectName() , 00038 _classId(), 00039 _visualObjectName(), 00040 _visuName(), 00041 _configParam( 0 ) 00042 { 00043 }
| AddAnimatorPrm::AddAnimatorPrm | ( | const AddAnimatorPrm & | ref | ) |
Copy constructor of AddAnimatorPrm.
Definition at line 47 of file OMKAddAnimatorPrm.cpp.
References _copy().
00048 : Base(), 00049 _configParam( 0 ) 00050 { 00051 _copy( ref ) ; 00052 }
| AddAnimatorPrm::AddAnimatorPrm | ( | const Name & | objectName, | |
| const Name & | classId, | |||
| const Name & | visualObjectName, | |||
| const Name & | VisuName, | |||
| const ConfigurationParameterDescriptor * | configParam | |||
| ) |
Constructor of AddAnimatorPrm with all the parameters.
Definition at line 56 of file OMKAddAnimatorPrm.cpp.
00061 : Base(), 00062 _objectName( objectName ) , 00063 _classId( classId ) , 00064 _visualObjectName( visualObjectName ) , 00065 _visuName( VisuName ) , 00066 _configParam( configParam ? configParam->clone() : 0 ) 00067 { 00068 }
| AddAnimatorPrm::~AddAnimatorPrm | ( | ) | [virtual] |
Destructor of AddAnimatorPrm.
Definition at line 72 of file OMKAddAnimatorPrm.cpp.
References _configParam.
00073 { 00074 delete _configParam ; 00075 }
| void AddAnimatorPrm::resetDefaultValues | ( | ) | [virtual] |
Reset the default values of AddAnimatorPrm.
Definition at line 79 of file OMKAddAnimatorPrm.cpp.
References _classId, _configParam, _visualObjectName, and _visuName.
Referenced by loadParameters().
00080 { 00081 //=== Reset default parameters 00082 _classId = Name() ; 00083 _visualObjectName = Name() ; 00084 _visuName = Name() ; 00085 delete _configParam ; 00086 _configParam = 0 ; 00087 }
| bool AddAnimatorPrm::loadParameters | ( | const ConfigurationParameterDescriptor * | node, | |
| const std::string & | prefix = "", |
|||
| SimulatedObject * | p = 0 | |||
| ) | [virtual] |
Configuration parameters loader of AddAnimatorPrm.
| [in] | node | the root node of the configuration parameter |
| [in] | prefix | the text that prefix the parameters name. No prefix by default. For example the parameter named "position" by default is loaded in the configuration parameters under the name "Position" (first is upper case), and with the prefix "first" will be loaded under the name "firstPosition" (could start with a lower case). |
| [in] | p | the simulated object use by the OMKParameterAccessor to display error messages. |
Definition at line 91 of file OMKAddAnimatorPrm.cpp.
References innerParametersLoader(), and resetDefaultValues().
Referenced by OMK::IAttributeAnimatorT< PrmType, ModelType, AccessorType >::initAnimator(), and OMK::Vis::VisObjectExtension::loadAnimatorParameters().
00094 { 00095 resetDefaultValues() ; 00096 return innerParametersLoader( node, prefix, p ); 00097 }
| bool AddAnimatorPrm::innerParametersLoader | ( | const ConfigurationParameterDescriptor * | node, | |
| const std::string & | prefix = "", |
|||
| SimulatedObject * | p = 0 | |||
| ) | [protected] |
Protected loader, does not reset the default values.
Definition at line 101 of file OMKAddAnimatorPrm.cpp.
References _classId, _configParam, _objectName, _visualObjectName, _visuName, OMK::ConfigurationParameterDescriptor::clone(), OMK::debugMsg(), OMK::ParametersAccessor::get(), and OMERROR.
Referenced by loadParameters().
00102 { 00103 // Tests the configuration parameter node 00104 if( !node ) 00105 { // No valid node => display error message and return false 00106 std::ostringstream txt ; 00107 txt << "Error in AddAnimatorPrm::innerParametersLoader"; 00108 if( p ) txt << " for " << OMK::debugMsg( p ) ; 00109 txt << std::endl << ">>> :-( Invalid node" << std::endl ; 00110 OMERROR( txt.str() ) ; 00111 return false ; 00112 } 00113 // return value 00114 bool ok = true ; 00115 00116 //=== The optional parameters => no test 00117 // Load the value of VisuName 00118 ParametersAccessor::get( node, prefix + "VisuName", _visuName ) ; 00119 // Load the value of ObjectName 00120 ParametersAccessor::get( node, prefix + "ObjectName", _objectName ) ; 00121 // Load the value of ObjectName 00122 ParametersAccessor::get( node, prefix + "VisualObjectName", _visualObjectName ) ; 00123 00124 //=== The needed parameters => tested 00125 // Load the value of ClassId 00126 ok = ParametersAccessor::get( node, prefix + "Class", _classId, p ) && ok ; 00127 // store the value of ConfigParam 00128 _configParam = node->clone() ; 00129 00130 return ok ; 00131 }
| void OMK::Type::AddAnimatorPrm::setObjectName | ( | const Name & | objectName | ) | [inline] |
Set the objectName value of AddVisualObjectPrm.
Definition at line 209 of file OMKAddAnimatorPrm.h.
Referenced by OMK::IAttributeAnimatorT< PrmType, ModelType, AccessorType >::initAnimator(), and OMK::Vis::VisObjectExtension::loadAnimatorParameters().
00209 { _objectName = objectName ; }
| const Name& OMK::Type::AddAnimatorPrm::getObjectName | ( | ) | const [inline] |
Return the objectName value of AddVisualObjectPrm.
Definition at line 211 of file OMKAddAnimatorPrm.h.
Referenced by _copy(), OMK::IAttributeAnimatorT< PrmType, ModelType, AccessorType >::initAnimator(), insertInStream(), operator!=(), and pack().
00211 { return _objectName ; }
| void OMK::Type::AddAnimatorPrm::setClassId | ( | const Name & | classId | ) | [inline] |
Set the classId value of AddAnimatorPrm.
Definition at line 214 of file OMKAddAnimatorPrm.h.
00214 { _classId = classId ; }
| const Name& OMK::Type::AddAnimatorPrm::getClassId | ( | ) | const [inline] |
Return the classId value of AddAnimatorPrm.
Definition at line 216 of file OMKAddAnimatorPrm.h.
Referenced by _copy(), insertInStream(), operator!=(), and pack().
00216 { return _classId ; }
| void OMK::Type::AddAnimatorPrm::setVisualObjectName | ( | const Name & | visualObjectName | ) | [inline] |
Set the visualObjectName value of AddAnimatorPrm.
Definition at line 219 of file OMKAddAnimatorPrm.h.
Referenced by OMK::Vis::VisObjectExtension::loadAnimatorParameters().
00219 { _visualObjectName = visualObjectName ; }
| const Name& OMK::Type::AddAnimatorPrm::getVisualObjectName | ( | ) | const [inline] |
Return the visualObjectName value of AddAnimatorPrm.
Definition at line 221 of file OMKAddAnimatorPrm.h.
Referenced by _copy(), insertInStream(), OMK::Vis::VisObjectExtension::loadAnimatorParameters(), operator!=(), and pack().
00221 { return _visualObjectName ; }
| void OMK::Type::AddAnimatorPrm::setVisuName | ( | const Name & | VisuName | ) | [inline] |
Set the VisuName value of AddAnimatorPrm.
Definition at line 224 of file OMKAddAnimatorPrm.h.
00224 { _visuName = VisuName ; }
| const Name& OMK::Type::AddAnimatorPrm::getVisuName | ( | ) | const [inline] |
Return the VisuName value of AddAnimatorPrm.
Definition at line 226 of file OMKAddAnimatorPrm.h.
Referenced by _copy(), insertInStream(), OMK::Vis::VisObjectExtension::loadAnimatorParameters(), operator!=(), and pack().
00226 { return _visuName ; }
| void OMK::Type::AddAnimatorPrm::setConfigParam | ( | const ConfigurationParameterDescriptor * | configParam | ) | [inline] |
Set the configParam value of AddAnimatorPrm.
Definition at line 229 of file OMKAddAnimatorPrm.h.
Referenced by OMK::IAttributeAnimatorT< PrmType, ModelType, AccessorType >::initAnimator().
00229 { _configParam = configParam ; }
| const ConfigurationParameterDescriptor* OMK::Type::AddAnimatorPrm::getConfigParam | ( | ) | const [inline] |
Return the configParam value of AddAnimatorPrm.
Definition at line 231 of file OMKAddAnimatorPrm.h.
Referenced by _copy(), insertInStream(), operator!=(), and pack().
00231 { return _configParam ; }
| bool OMK::Type::AddAnimatorPrm::operator== | ( | const AddAnimatorPrm & | ref | ) | const [inline] |
| bool AddAnimatorPrm::operator!= | ( | const AddAnimatorPrm & | ref | ) | const |
Comparison operator for difference.
Definition at line 136 of file OMKAddAnimatorPrm.cpp.
References _classId, _configParam, _objectName, _visualObjectName, _visuName, getClassId(), getConfigParam(), getObjectName(), getVisualObjectName(), and getVisuName().
00137 { 00138 return _objectName != ref.getObjectName() 00139 || _classId != ref.getClassId() 00140 || _visualObjectName != ref.getVisualObjectName() 00141 || _visuName != ref.getVisuName() 00142 || _configParam != ref.getConfigParam() ; 00143 }
| AddAnimatorPrm & AddAnimatorPrm::operator= | ( | const AddAnimatorPrm & | ref | ) |
Copy operator.
Definition at line 147 of file OMKAddAnimatorPrm.cpp.
References _copy().
00148 { 00149 if ( this != &ref ) 00150 { 00151 _copy( ref ) ; 00152 } 00153 return *this ; 00154 }
| void AddAnimatorPrm::insertInStream | ( | std::ostream & | = std::cout |
) | const [virtual] |
Insert datas in an output stream.
Implements OMK::Flowable.
Definition at line 158 of file OMKAddAnimatorPrm.cpp.
References getClassId(), getConfigParam(), getObjectName(), getVisualObjectName(), and getVisuName().
00159 { 00160 out << getObjectName() << " " 00161 << getClassId() << " " 00162 << getVisualObjectName() << " " 00163 << getVisuName() << " " 00164 << *getConfigParam() << " " 00165 << " " ; 00166 }
| void AddAnimatorPrm::extract | ( | std::istream & | = std::cin |
) | [virtual] |
Extract datas from an input stream.
Implements OMK::Flowable.
Definition at line 170 of file OMKAddAnimatorPrm.cpp.
References _classId, _configParam, _objectName, _visualObjectName, and _visuName.
00171 { 00172 in >> _objectName 00173 >> _classId 00174 >> _visualObjectName 00175 >> _visuName ; 00176 // At this step we must retrieve the configuration parameters 00177 // we assume that is a MultipleConfigurationParameter 00178 MultipleConfigurationParameter* configParamTmp = new MultipleConfigurationParameter ; 00179 in >> ( *configParamTmp ) ; 00180 delete _configParam ; 00181 _configParam = configParamTmp ; 00182 }
| void AddAnimatorPrm::pack | ( | OutgoingSynchronisationMessage & | out | ) | const [virtual] |
Pack datas in the message.
Reimplemented from OMK::Flowable.
Definition at line 186 of file OMKAddAnimatorPrm.cpp.
References getClassId(), getConfigParam(), getObjectName(), getVisualObjectName(), and getVisuName().
00187 { 00188 out << getObjectName() 00189 << getClassId() 00190 << getVisualObjectName() 00191 << getVisuName() 00192 << *getConfigParam() ; 00193 }
| void AddAnimatorPrm::unpack | ( | IncomingSynchronisationMessage & | in | ) | [virtual] |
Unpack datas from the message.
Reimplemented from OMK::Flowable.
Definition at line 197 of file OMKAddAnimatorPrm.cpp.
References _classId, _configParam, _objectName, _visualObjectName, and _visuName.
00198 { 00199 in >> _objectName 00200 >> _classId 00201 >> _visualObjectName 00202 >> _visuName ; 00203 // At this step we must retrieve the configuration parameters 00204 // we assume that is a MultipleConfigurationParameter 00205 MultipleConfigurationParameter* configParamTmp = new MultipleConfigurationParameter ; 00206 in >> ( *configParamTmp ) ; 00207 delete _configParam ; 00208 _configParam = configParamTmp ; 00209 }
| PolatorNT * AddAnimatorPrm::createPolator | ( | ) | [virtual] |
Default polator creator.
Implements OMK::Type::Base.
Definition at line 213 of file OMKAddAnimatorPrm.cpp.
00214 { 00215 return new Polator<AddAnimatorPrm>() ; 00216 }
| void AddAnimatorPrm::_copy | ( | const AddAnimatorPrm & | ref | ) | [protected] |
Copy methods call by constructor and operator.
Definition at line 220 of file OMKAddAnimatorPrm.cpp.
References _classId, _configParam, _objectName, _visualObjectName, _visuName, OMK::ConfigurationParameterDescriptor::clone(), getClassId(), getConfigParam(), getObjectName(), getVisualObjectName(), and getVisuName().
Referenced by AddAnimatorPrm(), and operator=().
00221 { 00222 _objectName = ref.getObjectName() ; 00223 _classId = ref.getClassId() ; 00224 _visualObjectName = ref.getVisualObjectName() ; 00225 _visuName = ref.getVisuName() ; 00226 delete _configParam ; 00227 _configParam = ref.getConfigParam() ? ref.getConfigParam()->clone() : 0 ; 00228 }
Name OMK::Type::AddAnimatorPrm::_objectName [protected] |
This member holds the ObjectName value of AddVisualObjectPrm.
The name of the visual object
Definition at line 269 of file OMKAddAnimatorPrm.h.
Referenced by _copy(), extract(), innerParametersLoader(), operator!=(), and unpack().
Name OMK::Type::AddAnimatorPrm::_classId [protected] |
This member holds the Class value of AddAnimatorPrm.
The class id to identify the class of the animator and to create a new one
Definition at line 273 of file OMKAddAnimatorPrm.h.
Referenced by _copy(), extract(), innerParametersLoader(), operator!=(), resetDefaultValues(), and unpack().
Name OMK::Type::AddAnimatorPrm::_visualObjectName [protected] |
This member holds the VisualObjectName value of AddAnimatorPrm.
The name of the visual object which the animator will be added to
Definition at line 277 of file OMKAddAnimatorPrm.h.
Referenced by _copy(), extract(), innerParametersLoader(), operator!=(), resetDefaultValues(), and unpack().
Name OMK::Type::AddAnimatorPrm::_visuName [protected] |
This member holds the VisuName value of AddAnimatorPrm.
The name of the visualisation. If null the message will be broadcasted, if not only the specified visualisation will received the message.
Definition at line 281 of file OMKAddAnimatorPrm.h.
Referenced by _copy(), extract(), innerParametersLoader(), operator!=(), resetDefaultValues(), and unpack().
const ConfigurationParameterDescriptor* OMK::Type::AddAnimatorPrm::_configParam [protected] |
This member holds the configParam value of AddAnimatorPrm.
Informations to buid the animator
Definition at line 285 of file OMKAddAnimatorPrm.h.
Referenced by _copy(), extract(), innerParametersLoader(), operator!=(), resetDefaultValues(), unpack(), and ~AddAnimatorPrm().

| Documentation generated on Mon Jun 9 11:46:05 2008 |
Generated with doxygen by Dimitri van Heesch , 1997-2007 |