#include <OMKJoint.h>
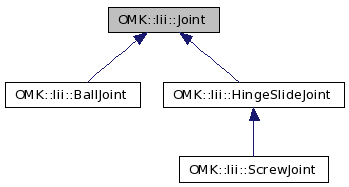
Inheritance diagram for OMK::Iii::Joint:
Protected Member Functions | |
Interface | |
| virtual void | establishLink () |
| Initialises the link reference positions. | |
| virtual void | currentJointPosition () |
| Calculates the current position of the joint. | |
| virtual bool | retroPropagation () |
| Calculates the ideal position of the reference point. | |
| virtual void | currentObjectPosition () |
| Calculates the current position of the object. | |
Protected Attributes | |
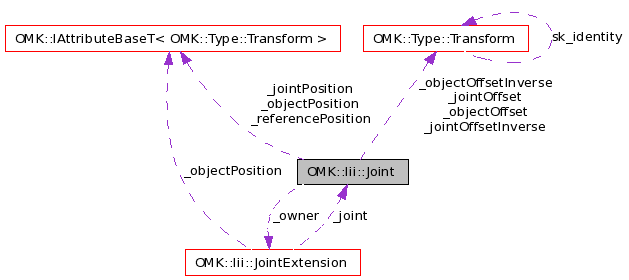
| OMK::Type::Transform | _jointOffset |
| The offset of the joint regarding the reference. | |
| OMK::Type::Transform | _jointOffsetInverse |
| The inverse of _jointOffset. | |
| OMK::Type::Transform | _objectOffset |
| The offset of the position regarding the joint. | |
| OMK::Type::Transform | _objectOffsetInverse |
| The inverse of _objectOffset. | |
| JointExtension * | _owner |
| The joint extension which the joint is associated to. | |
| IAttributeBaseT< OMK::Type::Transform > * | _objectPosition |
| The position of the object. | |
| IAttributeBaseT< OMK::Type::Transform > * | _referencePosition |
| The reference position. | |
| IAttributeBaseT< OMK::Type::Transform > * | _jointPosition |
| The joint position. | |
Private Member Functions | |
| DECLARE_JOINT_FACTORY (Joint) | |
Friends | |
| class | JointExtension |
Parameters are :
object
{
Class SimplePoint
Scheduling
{
Frequency 60
}
Extensions
{
joint
{
Class Joint
Retro enable
Joint Lock // The name of the joint
Attribute Position // The name of the attribute (by default "Position")
Level 0
}
}
UserParams
{
refPositionConnect [reference Position] // The reference position
jointPosition[[-30 20 -400]] // The initial joint position
Position [[30 0 -400]] // The initial object position
}
}
Definition at line 192 of file OMKJoint.h.
| OMK::Iii::Joint::DECLARE_JOINT_FACTORY | ( | Joint | ) | [private] |
| void OMK::Iii::Joint::establishLink | ( | ) | [protected, virtual] |
Initialises the link reference positions.
This method is called by the extension when the link is established. The current positions will be the reference positions.
Reimplemented in OMK::Iii::BallJoint, OMK::Iii::HingeSlideJoint, and OMK::Iii::ScrewJoint.
Definition at line 61 of file OMKJoint.cpp.
References _jointOffset, _jointOffsetInverse, _jointPosition, _objectOffset, _objectOffsetInverse, _objectPosition, _referencePosition, OMK::IAccessorT< T >::get(), OMK::Type::Transform::inverse(), OMK::Type::product(), and OMK::Type::Transform::updateFlags().
Referenced by OMK::Iii::HingeSlideJoint::establishLink(), OMK::Iii::BallJoint::establishLink(), and OMK::Iii::JointExtension::postComputeParameters().
00062 { 00063 // Must calculate the new offset between the reference position and the joint position 00064 // It is the current offset 00065 _jointOffset = product( _referencePosition->get().inverse(), _jointPosition->get() ) ; 00066 _jointOffset.updateFlags() ; 00067 00068 // Must calculate the new offset between the joint position and the object position 00069 // It is the current offset 00070 _objectOffset = product( _jointPosition->get().inverse(), _objectPosition->get() ) ; 00071 _objectOffset.updateFlags() ; 00072 00073 // Calculates the inverse transforms for optimisation 00074 _jointOffsetInverse = _jointOffset.inverse() ; 00075 _jointOffsetInverse.updateFlags() ; 00076 00077 _objectOffsetInverse = _objectOffset.inverse() ; 00078 _objectOffsetInverse.updateFlags() ; 00079 }
| void OMK::Iii::Joint::currentJointPosition | ( | ) | [protected, virtual] |
Calculates the current position of the joint.
The position is calculated according to the reference position object and the offset of the joint.
Definition at line 82 of file OMKJoint.cpp.
References _jointOffset, _jointPosition, _referencePosition, OMK::IAccessorT< T >::get(), OMK::Type::product(), and OMK::IAccessorT< T >::set().
Referenced by OMK::Iii::JointExtension::postComputeParameters().
00083 { 00084 // calculates the new joint position 00085 _jointPosition->set( product( _referencePosition->get(), _jointOffset ) ) ; 00086 }
| bool OMK::Iii::Joint::retroPropagation | ( | ) | [protected, virtual] |
Calculates the ideal position of the reference point.
Reimplemented in OMK::Iii::BallJoint, and OMK::Iii::HingeSlideJoint.
Definition at line 88 of file OMKJoint.cpp.
References _jointOffsetInverse, _objectOffsetInverse, _objectPosition, _referencePosition, OMK::IAccessorT< T >::get(), OMK::Type::product(), and OMK::IAccessorT< T >::set().
Referenced by OMK::Iii::JointExtension::postComputeParameters().
00089 { 00090 // Calculates the optimal position of the reference position to retro-propagates 00091 _referencePosition->set( product( product( _objectPosition->get(), _objectOffsetInverse ), _jointOffsetInverse ) ) ; 00092 return true ; 00093 }
| void OMK::Iii::Joint::currentObjectPosition | ( | ) | [protected, virtual] |
Calculates the current position of the object.
The position is calculated according to the joint position object and the offset of the object.
Reimplemented in OMK::Iii::BallJoint, and OMK::Iii::HingeSlideJoint.
Definition at line 95 of file OMKJoint.cpp.
References _jointPosition, _objectOffset, _objectPosition, OMK::IAccessorT< T >::get(), OMK::Type::product(), and OMK::IAccessorT< T >::set().
Referenced by OMK::Iii::JointExtension::postComputeParameters().
00096 { 00097 // calculates the new object position 00098 _objectPosition->set( product( _jointPosition->get(), _objectOffset ) ) ; 00099 }
friend class JointExtension [friend] |
Definition at line 194 of file OMKJoint.h.
OMK::Type::Transform OMK::Iii::Joint::_jointOffset [protected] |
The offset of the joint regarding the reference.
This offset is used to calculate the new joint position compared to the reference position, see currentJointPosition.
Definition at line 222 of file OMKJoint.h.
Referenced by currentJointPosition(), and establishLink().
The inverse of _jointOffset.
Definition at line 224 of file OMKJoint.h.
Referenced by establishLink(), OMK::Iii::HingeSlideJoint::retroPropagation(), OMK::Iii::BallJoint::retroPropagation(), and retroPropagation().
OMK::Type::Transform OMK::Iii::Joint::_objectOffset [protected] |
The offset of the position regarding the joint.
This offset is used to calculate the new object position compared to the joint position, see currentObjectPosition.
Definition at line 228 of file OMKJoint.h.
Referenced by OMK::Iii::HingeSlideJoint::currentObjectPosition(), OMK::Iii::BallJoint::currentObjectPosition(), currentObjectPosition(), OMK::Iii::HingeSlideJoint::establishLink(), OMK::Iii::BallJoint::establishLink(), establishLink(), OMK::Iii::HingeSlideJoint::retroPropagation(), and OMK::Iii::BallJoint::retroPropagation().
The inverse of _objectOffset.
Definition at line 230 of file OMKJoint.h.
Referenced by establishLink(), OMK::Iii::HingeSlideJoint::retroPropagation(), OMK::Iii::BallJoint::retroPropagation(), and retroPropagation().
JointExtension* OMK::Iii::Joint::_owner [protected] |
IAttributeBaseT< OMK::Type::Transform >* OMK::Iii::Joint::_objectPosition [protected] |
The position of the object.
The reference to the attribute which define the position of the object.
The name can be defined by the configuration parameter named Attribute, if not defined the default is Position.
Definition at line 238 of file OMKJoint.h.
Referenced by OMK::Iii::HingeSlideJoint::currentObjectPosition(), OMK::Iii::BallJoint::currentObjectPosition(), currentObjectPosition(), OMK::Iii::HingeSlideJoint::establishLink(), OMK::Iii::BallJoint::establishLink(), establishLink(), OMK::Iii::HingeSlideJoint::retroPropagation(), OMK::Iii::BallJoint::retroPropagation(), and retroPropagation().
IAttributeBaseT< OMK::Type::Transform >* OMK::Iii::Joint::_referencePosition [protected] |
The reference position.
This attribute is used to retrieve the position of the reference object.
Definition at line 241 of file OMKJoint.h.
Referenced by currentJointPosition(), establishLink(), OMK::Iii::HingeSlideJoint::retroPropagation(), OMK::Iii::BallJoint::retroPropagation(), and retroPropagation().
IAttributeBaseT< OMK::Type::Transform >* OMK::Iii::Joint::_jointPosition [protected] |
The joint position.
This attribute defines the position of the joint. This position follows the reference position and it is calculated by offsetting this one.
Definition at line 246 of file OMKJoint.h.
Referenced by currentJointPosition(), OMK::Iii::HingeSlideJoint::currentObjectPosition(), OMK::Iii::BallJoint::currentObjectPosition(), currentObjectPosition(), OMK::Iii::ScrewJoint::establishLink(), OMK::Iii::HingeSlideJoint::establishLink(), establishLink(), OMK::Iii::HingeSlideJoint::retroPropagation(), and OMK::Iii::BallJoint::retroPropagation().

| Documentation generated on Mon Jun 9 11:46:04 2008 |
Generated with doxygen by Dimitri van Heesch , 1997-2007 |