#include <OMKJoint.h>
Inheritance diagram for OMK::Iii::BallJoint:
Protected Member Functions | |
Interface | |
| virtual void | establishLink () |
| Initialises the link reference positions. | |
| virtual bool | retroPropagation () |
| Calculates the ideal position of the reference point. | |
| virtual void | currentObjectPosition () |
| Calculates the current position of the object. | |
Protected Attributes | |
Internal parameters. | |
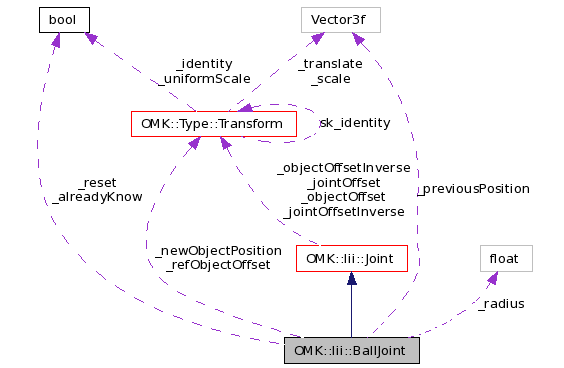
| OMK::Type::Transform | _newObjectPosition |
| The object position computed in retroPropagation. | |
| OMK::Type::Transform | _refObjectOffset |
| The reference. | |
| bool | _alreadyKnow |
| Flag to avoid the calculate twice the position. | |
| float | _radius |
| the radius of the ball. | |
| Wm4::Vector3f | _previousPosition |
| Previous object position translate to compute the translation. | |
| bool | _reset |
| Flag to reset the _previousPosition. | |
Private Member Functions | |
| DECLARE_JOINT_FACTORY (BallJoint) | |
Parameters are the same as the lock joint.
The following configuration can be used to lock an object on an other one.
object
{
...
joint
{
class Joint
...
Joint Ball // The ball joint
Attribute Position // The name of the attribute (by default "Position")
...
}
...
}
Definition at line 278 of file OMKJoint.h.
| OMK::Iii::BallJoint::DECLARE_JOINT_FACTORY | ( | BallJoint | ) | [private] |
| void OMK::Iii::BallJoint::establishLink | ( | ) | [protected, virtual] |
Initialises the link reference positions.
Reimplemented from OMK::Iii::Joint.
Definition at line 120 of file OMKJoint.cpp.
References _newObjectPosition, OMK::Iii::Joint::_objectOffset, OMK::Iii::Joint::_objectPosition, _radius, _refObjectOffset, _reset, OMK::Iii::Joint::establishLink(), OMK::IAccessorT< T >::get(), and OMK::Type::Transform::getTranslate().
00121 { 00122 Joint::establishLink() ; 00123 _radius = _objectOffset.getTranslate().Length() ; 00124 00125 // stores the reference offset 00126 _refObjectOffset = _objectOffset ; 00127 _newObjectPosition = _objectPosition->get() ; 00128 _reset = true ; 00129 }
| bool OMK::Iii::BallJoint::retroPropagation | ( | ) | [protected, virtual] |
Calculates the ideal position of the reference point.
Reimplemented from OMK::Iii::Joint.
Definition at line 131 of file OMKJoint.cpp.
References _alreadyKnow, OMK::Iii::Joint::_jointOffsetInverse, OMK::Iii::Joint::_jointPosition, _newObjectPosition, OMK::Iii::Joint::_objectOffset, OMK::Iii::Joint::_objectOffsetInverse, OMK::Iii::Joint::_objectPosition, _previousPosition, _radius, OMK::Iii::Joint::_referencePosition, _refObjectOffset, _reset, OMK::IAccessorT< T >::get(), OMK::Type::Transform::getRotate(), OMK::Type::Transform::getTranslate(), OMK::Type::Transform::inverse(), OMK::Type::product(), OMK::IAccessorT< T >::set(), OMK::Type::Transform::setRotate(), OMK::Type::Transform::setTranslate(), and OMK::Type::Transform::updateFlags().
00132 { 00133 if( _reset ) 00134 { 00135 _previousPosition = _objectPosition->get().getTranslate() ; 00136 _reset = false ; 00137 } 00138 // Get the joint axis and perpendicular plane 00139 Wm4::Vector3f axis( _refObjectOffset.getTranslate() ) ; 00140 axis.Normalize() ; 00141 00142 // the reference position according to the position of the joint and the reference offset 00143 OMK::Type::Transform refObjectPosition( product( _jointPosition->get(), _refObjectOffset ) ) ; 00144 00145 // The reference orientation 00146 Wm4::Matrix3f refOrientation = _jointPosition->get().getRotate() ; 00147 // get the new orientation 00148 Wm4::Matrix3f newOrientation = _objectPosition->get().getRotate() * ( refObjectPosition.getRotate().Transpose() * refOrientation ) ; 00149 00150 // Only the translation 00151 bool isConstraint = _objectPosition->get().getTranslate() != refObjectPosition.getTranslate() ; 00152 00153 // The new object position 00154 // = the position of the joint 00155 // + the position along the axis 00156 _newObjectPosition.setTranslate( _jointPosition->get().getTranslate() + ( newOrientation * axis ) * _radius ) ; 00157 _newObjectPosition.setRotate( newOrientation ) ; 00158 _alreadyKnow = true ; 00159 // update the current object offset 00160 _objectOffset = product( _jointPosition->get().inverse(), _newObjectPosition ) ; 00161 _objectOffset.updateFlags() ; 00162 _objectOffsetInverse = _objectOffset.inverse() ; 00163 _objectOffsetInverse.updateFlags() ; 00164 00165 if( isConstraint ) 00166 { 00167 // Calculates the optimal position of the reference position to retro-propagates 00168 OMK::Type::Transform newJointPosition( _jointPosition->get().getTranslate() 00169 + _objectPosition->get().getTranslate() 00170 - _previousPosition, 00171 _jointPosition->get().getRotate() ) ; 00172 _referencePosition->set( product( newJointPosition, _jointOffsetInverse ) ) ; 00173 _reset = true ; 00174 } 00175 00176 return isConstraint ; 00177 }
| void OMK::Iii::BallJoint::currentObjectPosition | ( | ) | [protected, virtual] |
Calculates the current position of the object.
Reimplemented from OMK::Iii::Joint.
Definition at line 179 of file OMKJoint.cpp.
References _alreadyKnow, OMK::Iii::Joint::_jointPosition, _newObjectPosition, OMK::Iii::Joint::_objectOffset, OMK::Iii::Joint::_objectPosition, OMK::IAccessorT< T >::get(), OMK::Type::product(), and OMK::IAccessorT< T >::set().
00180 { 00181 if( _alreadyKnow ) 00182 { 00183 _alreadyKnow = false ; 00184 _objectPosition->set( _newObjectPosition ) ; 00185 } 00186 else 00187 { 00188 // calculates the new object position 00189 _objectPosition->set( product( _jointPosition->get(), _objectOffset ) ) ; 00190 } 00191 }
The object position computed in retroPropagation.
This value is stored to optimise the compute.
Definition at line 295 of file OMKJoint.h.
Referenced by currentObjectPosition(), establishLink(), and retroPropagation().
The reference.
Definition at line 297 of file OMKJoint.h.
Referenced by establishLink(), and retroPropagation().
bool OMK::Iii::BallJoint::_alreadyKnow [protected] |
Flag to avoid the calculate twice the position.
Definition at line 299 of file OMKJoint.h.
Referenced by currentObjectPosition(), and retroPropagation().
float OMK::Iii::BallJoint::_radius [protected] |
the radius of the ball.
Its value is set during the establishLink call.
Definition at line 302 of file OMKJoint.h.
Referenced by establishLink(), and retroPropagation().
Wm4::Vector3f OMK::Iii::BallJoint::_previousPosition [protected] |
Previous object position translate to compute the translation.
Definition at line 304 of file OMKJoint.h.
Referenced by retroPropagation().
bool OMK::Iii::BallJoint::_reset [protected] |
Flag to reset the _previousPosition.
Definition at line 306 of file OMKJoint.h.
Referenced by establishLink(), and retroPropagation().

| Documentation generated on Mon Jun 9 11:46:04 2008 |
Generated with doxygen by Dimitri van Heesch , 1997-2007 |