#include <OMKOgreVis.h>
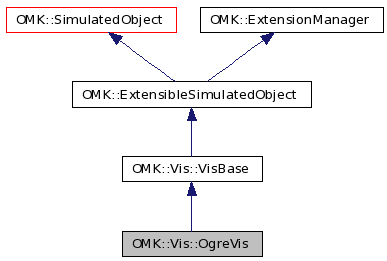
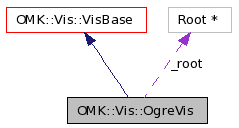
Inheritance diagram for OMK::Vis::OgreVis:
Public Member Functions | |
| const Ogre::Root & | getRoot (void) const |
| returns a const reference to the Ogre3D root | |
| Ogre::Root & | touchRoot (void) const |
| returns a reference to the Ogre3D root | |
Private Member Functions | |
| DECLARE_OBJECT_FACTORY (OgreVis) | |
| bool | ogreInitialisation (const std::string &pluginsFile, const std::string &configurationFile, const std::string &resourcesFile, const std::string &sceneManagerType, const std::string &windowName) |
| initialises Ogre3D, using the parameters found in ogre.cfg or by displaying a configuration window if there is no ogre.cfg available. | |
| void | createSceneManager (const std::string &sceneManagerType) |
| creates a ST_GENERIC SceneManager named "SceneManager" | |
| void | createResourceListener (void) |
| not implemented yet | |
| void | addResourceLocations (const std::string &resourcesFile) |
| add the resources path given in the resources.cfg file | |
| void | initResources (void) |
| initialises all the resource groups | |
| void | loadSceneFile (const std::string &resourceGroupName, const std::string &sceneFileName) |
| load the dotScene file of configuration parameters "SceneFile" and resource group "ResourceGroup" | |
| const std::string & | initCamera (const std::string &cameraName) |
| initialises the ogre camera of name cameraName if no camera was specified by the configuration parameter "Camera" it creates a default camera named "camera0" positioned at (0,0,0), looking at (0,0,-1), with (1,1000) clipping planes return the name of the created camera | |
| void | createViewport (const std::string &cameraName) |
| creates a default viewport of colour (0.5,0.5,0.5) | |
Inherited | |
| virtual void | computeParameters () |
| Compute the new picture to display. | |
Loaders | |
| virtual bool | loadParameters (const ConfigurationParameterDescriptor *node) |
| Configuration parameters loader of OgreVis. | |
Private Attributes | |
| Ogre::Root * | _root |
| Ogre3D root, unique point of access to the Ogre3D scene organization. | |
This Simulated Object initialises Ogre3D, creates default window/viewport/camera and manages the visual objects and animators creation and updates
User parameters :
Definition at line 51 of file OMKOgreVis.h.
| OMK::Vis::OgreVis::DECLARE_OBJECT_FACTORY | ( | OgreVis | ) | [private] |
| const Ogre::Root & OMK::Vis::OgreVis::getRoot | ( | void | ) | const [inline] |
returns a const reference to the Ogre3D root
Definition at line 122 of file OMKOgreVis.h.
References _root.
Referenced by OMK::Inp::BoundingBoxExtension::action(), and OMK::Inp::DistributedCameraListener::readConfigurationParameters().
00123 { 00124 return *_root ; 00125 }
| Ogre::Root & OMK::Vis::OgreVis::touchRoot | ( | void | ) | const [inline] |
returns a reference to the Ogre3D root
Definition at line 131 of file OMKOgreVis.h.
Referenced by OMK::Inp::SceneDetailsExtension::action(), OMK::Inp::InputExtension::createOISInputSystem(), OMK::Inp::DistributedCameraListener::finish(), OMK::Inp::DistributedCameraListener::init(), OMK::Inp::InputExtension::initOIS(), OMK::Vis::OgreObjectScene::loadGeometry(), OMK::Vis::CameraBaseExtension::retreiveCamera(), OMK::Inp::DebugOverlayExtension::updateStats(), and OMK::Vis::OgreObject::~OgreObject().
| void OgreVis::computeParameters | ( | ) | [private, virtual] |
Compute the new picture to display.
This method loops in the list of visual objects to ask to them to update their display.
Reimplemented from OMK::Vis::VisBase.
Definition at line 204 of file OMKOgreVis.cpp.
References _root, and OMK::Vis::VisBase::computeParameters().
00205 { 00206 VisBase::computeParameters() ; 00207 00208 //Allow platform to pump/create/etc messages/events once per frame 00209 Ogre::WindowEventUtilities::messagePump( ) ; 00210 _root->renderOneFrame() ; 00211 }
| bool OgreVis::loadParameters | ( | const ConfigurationParameterDescriptor * | node | ) | [private, virtual] |
Configuration parameters loader of OgreVis.
| [in] | node | the root node of the configuration parameter. |
Reimplemented from OMK::ExtensibleSimulatedObject.
Definition at line 85 of file OMKOgreVis.cpp.
References _root, createViewport(), OMK::Vis::debugMsg(), OMK::ParametersAccessor::get(), initCamera(), OMK::ExtensibleSimulatedObject::loadParameters(), loadSceneFile(), ogreInitialisation(), OMERROR, OMK_DEBUG_VIS, and OMTRACEID.
00086 { 00087 bool ok( VisBase::loadParameters( node ) ); 00088 00089 // Retrieve the plugins for Ogre 00090 std::string pluginsFile ; 00091 if( ParametersAccessor::get( node, "OgreHome", pluginsFile ) ) 00092 { 00093 #if defined _MSC_VER 00094 // Windows 00095 # if defined NDEBUG 00096 pluginsFile += "\\bin\\release\\Plugins.cfg" ; 00097 # else // !defined NDEBUG 00098 pluginsFile += "\\bin\\debug\\Plugins.cfg" ; 00099 # endif 00100 #else 00101 // Linux 00102 pluginsFile += "/lib/OGRE/Plugins.cfg" ; 00103 #endif 00104 } 00105 else if( !ParametersAccessor::get( node, "PluginsCfg", pluginsFile ) ) 00106 { 00107 OMERROR( "Error for " << debugMsg( this ) << std::endl 00108 << ">>> :-( Unable to determine which configuration must be used for Ogre." << std::endl 00109 << "One of these two fields, 'OgreHome' or 'PluginsCfg', must be set." << std::endl 00110 << "The path to the Ogre folder is defined in 'OgreHome' like this : OgreHome \"${OGRE_HOME}\"" << std::endl 00111 << "Or the configuration file path is defined in 'OgrePluginsCfg' like this : PluginsCfg \"${OGRE_HOME}/lib/OGRE/plugins.cfg\"" << std::endl 00112 << "See documentation" ) ; 00113 ok = false ; 00114 } 00115 00116 if ( ok ) 00117 { 00118 // Retrieve the configuration file 00119 std::string configFile( "ogre.cfg" ) ; 00120 if( !ParametersAccessor::get( node, "ConfigFile", configFile ) ) 00121 { 00122 OMTRACEID( OMK_DEBUG_VIS, "Warning for " << debugMsg( this ) << std::endl 00123 << ">>> :-| no configuration file provided, will use \"ogre.cfg\" by default" ) ; 00124 } 00125 00126 // Retrieve the resource configuration 00127 std::string resourcesFile( "resources.cfg" ) ; 00128 if( !ParametersAccessor::get( node, "ResourcesFile", resourcesFile ) ) 00129 { 00130 OMTRACEID( OMK_DEBUG_VIS, "Warning for " << debugMsg( this ) << std::endl 00131 << ">>> :-| no resources file provided, will use \"resources.cfg\" by default" ) ; 00132 } 00133 00134 // Retrieve the resource group name 00135 std::string resourceGroupName( "General" ) ; // default value 00136 if( !ParametersAccessor::get( node, "ResourceGroup", resourceGroupName ) ) 00137 { 00138 OMTRACEID( OMK_DEBUG_VIS, "Warning for " << debugMsg( this ) << std::endl 00139 << ">>> :-| no resource group name provided, will use \"General\" by default" ) ; 00140 } 00141 00142 // Retrieve scene file name 00143 std::string sceneFileName ; 00144 if( !ParametersAccessor::get( node, "SceneFile", sceneFileName ) ) 00145 { 00146 OMTRACEID( OMK_DEBUG_VIS, "Warning for " << debugMsg( this ) << std::endl 00147 << ">>> :-| no scene file name provided" ) ; 00148 } 00149 00150 // Retrieve camera name 00151 std::string cameraName ; 00152 if( !ParametersAccessor::get( node, "Camera", cameraName ) ) 00153 { 00154 OMTRACEID( OMK_DEBUG_VIS, "Warning for " << debugMsg( this ) << std::endl 00155 << ">>> :-| no camera name provided" ) ; 00156 } 00157 00158 // Retrieve sceneManagerType 00159 std::string sceneManagerType( "DefaultSceneManager" ) ; 00160 if( !ParametersAccessor::get( node, "SceneManagerType", sceneManagerType ) ) 00161 { 00162 OMTRACEID( OMK_DEBUG_VIS, "Warning for " << debugMsg( this ) << std::endl 00163 << ">>> :-| no SceneManagerType provided" ) ; 00164 } 00165 00166 // Retrieve windowName 00167 std::string windowName( "Ogre Window" ) ; 00168 if( !ParametersAccessor::get( node, "WindowName", windowName ) ) 00169 { 00170 OMTRACEID( OMK_DEBUG_VIS, "Warning for " << debugMsg( this ) << std::endl 00171 << ">>> :-| no WindowName provided" ) ; 00172 } 00173 00174 // createLog 00175 00176 // OGRE initialisation 00177 ok = ogreInitialisation( pluginsFile, configFile, resourcesFile, sceneManagerType, windowName ) ; 00178 if ( ok ) 00179 { 00180 // load the dotScene file of configuration parameters "SceneFile" 00181 // and resource group "ResourceGroup" 00182 loadSceneFile( resourceGroupName, sceneFileName ) ; 00183 00184 if ( _root->getAutoCreatedWindow()->getNumViewports() == 0 ) 00185 { 00186 // try to initialise the camera named "Camera" 00187 // if cameraName was not specified a default camera is created 00188 cameraName = initCamera( cameraName ) ; 00189 00190 00191 // creates a default viewport of colour (0.5,0.5,0.5) 00192 createViewport( cameraName ) ; 00193 } 00194 } 00195 } 00196 00197 return ok ; 00198 }
| bool OgreVis::ogreInitialisation | ( | const std::string & | pluginsFile, | |
| const std::string & | configurationFile, | |||
| const std::string & | resourcesFile, | |||
| const std::string & | sceneManagerType, | |||
| const std::string & | windowName | |||
| ) | [private] |
initialises Ogre3D, using the parameters found in ogre.cfg or by displaying a configuration window if there is no ogre.cfg available.
Definition at line 217 of file OMKOgreVis.cpp.
References _root, addResourceLocations(), createResourceListener(), createSceneManager(), and initResources().
Referenced by loadParameters().
00222 { 00223 bool initialised( false ) ; 00224 00225 // creation of Ogre Root 00226 _root = new Ogre::Root( pluginsFile, configurationFile, "" ) ; 00227 00228 // add resource locations 00229 addResourceLocations( resourcesFile ); 00230 00231 // Show the configuration dialog and initialise the system 00232 // You can skip this and use root.restoreConfig() to load configuration 00233 // settings if you were sure there are valid ones saved in ogre.cfg 00234 if( ( _root->restoreConfig() == true ) || ( _root->showConfigDialog() == true ) ) 00235 { 00236 // If returned true, user clicked OK so initialise 00237 // Here we choose to let the system create a default rendering window by passing 'true' 00238 _root->initialise( true, windowName ) ; 00239 00240 // creates a sceneManager named "sceneManager" of type ST_GENERIC 00241 createSceneManager( sceneManagerType ) ; 00242 00243 // Set default mipmap level (NB some APIs ignore this) 00244 TextureManager::getSingleton().setDefaultNumMipmaps( 5 ) ; 00245 00246 // Create any resource listeners (for loading screens) 00247 createResourceListener() ; 00248 00249 // Initialise resources 00250 initResources(); 00251 00252 #if !defined NDEBUG 00253 // Initialise the trace output to the console 00254 OBT::Singleton<OBT::Tracer>::getInstance().setOutput( new LogOutput, true ) ; 00255 #endif 00256 00257 initialised = true ; 00258 } 00259 00260 return initialised ; 00261 }
| void OgreVis::createSceneManager | ( | const std::string & | sceneManagerType | ) | [private] |
creates a ST_GENERIC SceneManager named "SceneManager"
Definition at line 267 of file OMKOgreVis.cpp.
References _root, and OMFATALERROR.
Referenced by ogreInitialisation().
00268 { 00269 try 00270 { 00271 // Create the SceneManager 00272 _root->createSceneManager( sceneManagerType, "sceneManager" ) ; 00273 } 00274 catch ( Ogre::ItemIdentityException& e ) 00275 { 00276 OMFATALERROR( "Scene manager type : " << sceneManagerType << " does not exist" << std::endl 00277 << e.getFullDescription() ) ; 00278 } 00279 }
| void OgreVis::createResourceListener | ( | void | ) | [private] |
not implemented yet
Definition at line 285 of file OMKOgreVis.cpp.
Referenced by ogreInitialisation().
| void OgreVis::addResourceLocations | ( | const std::string & | resourcesFile | ) | [private] |
add the resources path given in the resources.cfg file
Definition at line 293 of file OMKOgreVis.cpp.
Referenced by ogreInitialisation().
00294 { 00295 // Load resource paths from config file 00296 ConfigFile configFile ; 00297 configFile.load( resourcesFile ) ; 00298 00299 // Go through all sections & settings in the file 00300 ConfigFile::SectionIterator sectionIterator( configFile.getSectionIterator() ) ; 00301 00302 String sectionName ; 00303 String typeName ; 00304 String archName ; 00305 while ( sectionIterator.hasMoreElements() == true ) 00306 { 00307 sectionName = sectionIterator.peekNextKey(); 00308 ConfigFile::SettingsMultiMap* settings( sectionIterator.getNext() ) ; 00309 for ( ConfigFile::SettingsMultiMap::iterator i( settings->begin() ) ; i != settings->end(); ++i ) 00310 { 00311 typeName = i->first ; 00312 archName = i->second ; 00313 ResourceGroupManager::getSingleton().addResourceLocation( archName, typeName, sectionName ) ; 00314 } 00315 } 00316 }
| void OgreVis::initResources | ( | void | ) | [private] |
initialises all the resource groups
Definition at line 322 of file OMKOgreVis.cpp.
Referenced by ogreInitialisation().
| void OgreVis::loadSceneFile | ( | const std::string & | resourceGroupName, | |
| const std::string & | sceneFileName | |||
| ) | [private] |
load the dotScene file of configuration parameters "SceneFile" and resource group "ResourceGroup"
Definition at line 331 of file OMKOgreVis.cpp.
References _root, OMK::Vis::debugMsg(), OMK_DEBUG_VIS, and OMTRACEID.
Referenced by loadParameters().
00332 { 00333 if ( sceneFileName.empty() == false ) 00334 { 00335 // load the scene associated to the simulated object OgreVis 00336 OBT::Singleton<dsi::dotSceneLoader>::getInstance().load 00337 ( sceneFileName, 00338 resourceGroupName, 00339 _root->getSceneManager( "sceneManager" ), 00340 _root->getAutoCreatedWindow(), 00341 NULL, 00342 false, 00343 false, 00344 true ) ; 00345 00346 // check for load errors 00347 dsi::dotSceneInfo::itLoadLog it( dsi::dotSceneInfo::getSceneLoadingLog() ) ; 00348 String errs ; 00349 while ( it.hasMoreElements() ) 00350 { 00351 errs += it.getNext() + "\n"; 00352 } 00353 if ( errs != StringUtil::BLANK ) 00354 { 00355 OMTRACEID( OMK_DEBUG_VIS, "Warning for " << debugMsg( this ) << std::endl 00356 << ">>> :-| errors occured during scene loading\n" << errs ) ; 00357 } 00358 } 00359 }
| const std::string & OgreVis::initCamera | ( | const std::string & | cameraName | ) | [private] |
initialises the ogre camera of name cameraName if no camera was specified by the configuration parameter "Camera" it creates a default camera named "camera0" positioned at (0,0,0), looking at (0,0,-1), with (1,1000) clipping planes return the name of the created camera
Definition at line 365 of file OMKOgreVis.cpp.
References _root.
Referenced by loadParameters().
00366 { 00367 Ogre::SceneManager* sceneManager( _root->getSceneManager( "sceneManager" ) ) ; 00368 // creates a default camera if cameraName does not exist 00369 if ( sceneManager->hasCamera( cameraName ) == false ) 00370 { 00371 00372 // Create the camera 00373 Camera* camera( sceneManager->createCamera( "camera0" ) ) ; 00374 // Position it at 0, 0, 0 00375 camera->setPosition( Vector3( 0, 0, 0 ) ) ; 00376 // Look back along -Z 00377 camera->lookAt( Vector3( 0, 0, -1 ) ) ; 00378 camera->setNearClipDistance( 1 ) ; 00379 camera->setFarClipDistance( 5000 ) ; 00380 00381 //Put Camera on Node, useful for SoundListener 00382 SceneNode* cameraNode( sceneManager->getRootSceneNode()->createChildSceneNode( "CameraNode" ) ) ; 00383 cameraNode->attachObject( camera ); 00384 return camera->getName() ; 00385 } 00386 return cameraName ; 00387 }
| void OgreVis::createViewport | ( | const std::string & | cameraName | ) | [private] |
creates a default viewport of colour (0.5,0.5,0.5)
Definition at line 393 of file OMKOgreVis.cpp.
References _root.
Referenced by loadParameters().
00394 { 00395 Ogre::Camera* camera( _root->getSceneManager( "sceneManager" )->getCamera( cameraName ) ) ; 00396 00397 // Create one viewport, entire window 00398 Viewport* viewport( _root->getAutoCreatedWindow()->addViewport( camera ) ) ; 00399 viewport->setBackgroundColour( ColourValue( 0.5, 0.5, 0.5 ) ) ; 00400 00401 // Alter the camera aspect ratio to match the viewport 00402 camera->setAspectRatio( Real( viewport->getActualWidth() ) / Real( viewport->getActualHeight() ) ) ; 00403 }
Ogre::Root* OMK::Vis::OgreVis::_root [private] |
Ogre3D root, unique point of access to the Ogre3D scene organization.
Definition at line 115 of file OMKOgreVis.h.
Referenced by computeParameters(), createSceneManager(), createViewport(), getRoot(), initCamera(), loadParameters(), loadSceneFile(), and ogreInitialisation().

| Documentation generated on Mon Jun 9 11:46:05 2008 |
Generated with doxygen by Dimitri van Heesch , 1997-2007 |